F_VN_MeasureEdgeDistanceExp2

Measure the distance between two parallel edges. The midpoint between aStartPoint and aEndPoint must be located between the two edges. (expert function)
Can use available TwinCAT Job Tasks for executing parallel code regions.
Can return partial results when canceled by Watchdog.
Syntax
Definition:
FUNCTION F_VN_MeasureEdgeDistanceExp2 : HRESULT
VAR_INPUT
ipSrcImage : ITcVnImage;
END_VAR
VAR_IN_OUT
fAvgDistance : REAL;
aStartPoint : TcVnPoint2_REAL;
aEndPoint : TcVnPoint2_REAL;
END_VAR
VAR_INPUT
eEdgeDirection : ETcVnEdgeDirection;
fMinStrength : REAL;
nSearchLines : UDINT;
fSearchLineDist : REAL;
nMaxThickness : UDINT;
bInvertSearchDirection : BOOL;
fSearchGap : REAL;
nSubpixelsIterations : UDINT;
fApproxPrecision : REAL;
eAlgorithm : ETcVnEdgeDetectionAlgorithm;
ipEdgePoints1 : Reference To ITcVnContainer;
ipEdgePoints2 : Reference To ITcVnContainer;
ipDistances : Reference To ITcVnContainer;
fRangeCutoffFactor : REAL;
hrPrev : HRESULT;
END_VARInputs
|
Name |
Type |
Description |
|---|---|---|
|
ipSrcImage |
Source image (1 channel) | |
|
eEdgeDirection |
Specification of the edge direction from aStartPoint to aEndPoint to search for | |
|
fMinStrength |
REAL |
Specification of the minimum strength (intensity difference) of the edge to search for |
|
nSearchLines |
UDINT |
Width of the search window, i.e. the number of search lines (1, 3, 5, 7, ...), centered around the line specified by aStartPoint and aEndPoint |
|
fSearchLineDist |
REAL |
Distance between the search lines in pixels (> 0) |
|
nMaxThickness |
UDINT |
Specification of the maximum thickness of the edge to search for, which means fMinStrength must be reached within nMaxThickness pixels |
|
bInvertSearchDirection |
BOOL |
If true, the search starts from the center point between aStartPoint and aEndPoint in both directions |
|
fSearchGap |
REAL |
Optional width of a gap (>= 0, centered between aStartPoint and aEndPoint), that is neglected for searching edges (can reduce execution time). The 2 edges to search for must be on different sides of the gap. |
|
nSubpixelsIterations |
UDINT |
Specifies the number of subpixels (for INTERPOLATION, 10 - 20 usually is sufficient) or maximum number of iterations for optimizing the parameters (for APPROX_ERF and APPROX_GAUSSIAN, 50 - 100 usually is sufficient) |
|
fApproxPrecision |
REAL |
Specifies the approximation precision for APPROX_ERF and APPROX_GAUSSIAN (0.001 usually is sufficient, unused for INTERPOLATION) |
|
eAlgorithm |
Selection of the edge detection algorithm | |
|
ipEdgePoints1 |
Reference To ITcVnContainer |
Returns the detected edge points of the edge near aStartPoint (optional, set to 0 if not required; ContainerType_Vector_TcVnPoint2_REAL) |
|
ipEdgePoints2 |
Reference To ITcVnContainer |
Returns the detected edge points of the edge near aEndPoint (optional, set to 0 if not required; ContainerType_Vector_TcVnPoint2_REAL) |
|
ipDistances |
Reference To ITcVnContainer |
Returns the distances between the detected edge points (optional, set to 0 if not required; ContainerType_Vector_REAL) |
|
fRangeCutoffFactor |
REAL |
Relative edge strength factor to cut off the range of pixels used for approximation. Negative numbers are valid to include noise, i.e. intensity differences in the other direction. At most nMaxThickness pixels are used in each direction. |
|
hrPrev |
HRESULT indicating the result of previous operations (If SUCCEEDED(hrPrev) equals false, no operation is executed.) |
In/Outputs
|
Name |
Type |
Description |
|---|---|---|
|
fAvgDistance |
REAL |
Returns the average distance between the detected edges |
|
aStartPoint |
Position from which to start the search process (in the direction of aEndPoint) | |
|
aEndPoint |
Position where the search process ends |
Further information
The F_VN_MeasureEdgeDistanceExp2 function is the expert version of F_VN_MeasureEdgeDistance. It contains additional parameters.
Parameter
Input image
The ipSrcImage input image must be a 1-channel grayscale image.
Average distance (Return value)
The fAvgDistance parameter returns the average distance between the two localized edges.
The search window
First, a search window has to be defined to determine where and in which direction to search for an edge. This is done using the aStartPoint, aEndPoint and nSearchLines parameters. The search window results from the search line from aStartPoint to aEndPoint and parallel to it (nSearchLines - 1) / 2 search lines in each direction, each with 1 pixel distance. Thus nSearchLines defines the number of search lines and must always have an odd value.
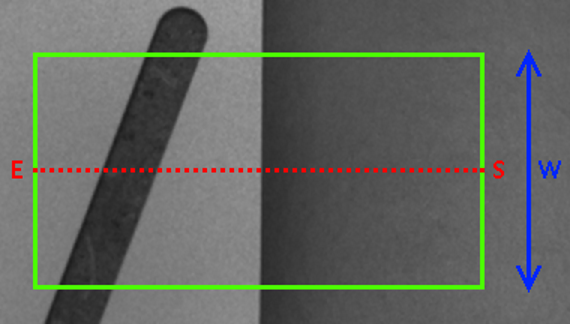 Fig.15: S: StartPoint, E: EndPoint, W: WindowWidth
Fig.15: S: StartPoint, E: EndPoint, W: WindowWidthLocalized edge points (Expert, return value)
The ipEdgePoints1 and ipEdgePoints2 containers return the exact points that were localized on the basis of each search line. If not needed, the 0 value can be transferred instead of an interface pointer.
Measured distances (Expert, return value)
The ipDistances container returns all measured distances between opposite points. If not needed, the 0 value can be transferred instead of an interface pointer.
Search gap (Expert)
With fSearchGap you can specify an area in the middle of the defined search line that is omitted or skipped during the search. This can reduce the execution time.
Parameters for edge localization
The remaining parameters are explained in detail in the chapter Edge localization.
Application
The measurement of an edge distance with expert parameters looks like this, for example:
hr := F_VN_MeasureEdgeDistanceExp2(
ipSrcImage := ipImageIn,
fAvgDistance := fAvgDistance,
aStartPoint := aStartPoint,
aEndPoint := aEndPoint,
eEdgeDirection := TCVN_ED_LIGHT_TO_DARK,
fMinStrength := fMinStrength,
nSearchLines := nSearchLines,
fSearchLineDist := 3,
nMaxThickness := 7,
bInvertSearchDirection := TRUE,
fSearchGap := 100,
nSubpixelsIterations := nSubpixIter,
fApproxPrecision := 0.001,
eAlgorithm := eAlgorithm,
ipEdgePoints1 := ipEdgePoints1,
ipEdgePoints2 := ipEdgePoints2,
ipDistances := ipDistances,
fRangeCutoffFactor := 0.135,
hrPrev := hr);Related functions
- ClosestPointsBF for calculating the closest points in two point clouds
- MeasureAngleBetweenEdges for measuring the angle between two edges
- MeasureEdgeDistance for measuring the average distance between two edges
- MeasureMinEdgeDistance for measuring the minimum distance between two edges
Required License
TC3 Vision Metrology 2D
System Requirements
|
Development environment |
Target platform |
PLC libraries to include |
|---|---|---|
|
TwinCAT V3.1.4024.59 or later |
PC or CX (x64) with min. PL50, e.g. Intel 4-core Atom CPU |
Tc3_Vision |