F_VN_FuseImages

Fuse 2 images vertically (intended for line scan cameras).
Syntax
Definition:
FUNCTION F_VN_FuseImages : HRESULT
VAR_INPUT
ipSrcImage1 : ITcVnImage;
ipSrcImage2 : ITcVnImage;
ipDestImage : Reference To ITcVnImage;
nFirstLine : UDINT;
nNumLines : UDINT;
hrPrev : HRESULT;
END_VAR
 Inputs
Inputs
|
Name |
Type |
Description |
|---|---|---|
|
ipSrcImage1 |
Source image 1 | |
|
ipSrcImage2 |
Source image 2 | |
|
ipDestImage |
Reference To ITcVnImage |
Destination image |
|
nFirstLine |
UDINT |
Line index in ipSrcImage1, which is the first line in ipDestImage |
|
nNumLines |
UDINT |
The number of lines that should be copied to ipDestImage, starting with nFirstLine in ipSrcImage1. Once the last line of ipSrcImage1 was copied, the remaining lines are copied from ipSrcImage2, starting at line index 0. |
|
hrPrev |
HRESULT indicating the result of previous operations (If SUCCEEDED(hrPrev) equals false, no operation is executed.) |
 Return value
Return valueFurther information
The function F_VN_FuseImages joins two images to form a new contiguous image. This is of particular interest for line scan cameras.
The function F_VN_FuseImagesArray can be used to fuse up to 10 images.
Application
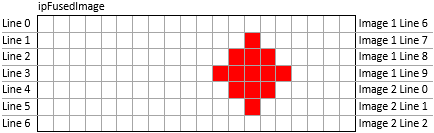
Line scan cameras usually return a given number of successively captured lines as a 2D image. This 2D image can contain an entire object of interest (shown in green in the figure below), or it can contain part of an object (shown in red in the figure).

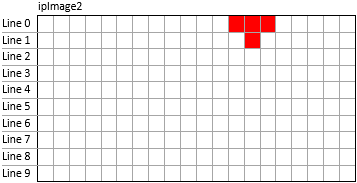
To analyze the red object, the function F_VN_FuseImages can be used to fuse the two object parts to form an complete image. If it is known which lines relate to the object, the linking can be limited to the relevant lines.
F_VN_FuseImages(ipImage1, ipImage2, ipFusedImage, 6, 7, S_OK);
Samples
Related functions
- F_VN_FuseImages for fusing two images
- F_VN_FuseImagesArray for fusing up to 10 images
Required License
TC3 Vision Base
System Requirements
Development environment | Target platform | PLC libraries to include |
|---|---|---|
TwinCAT V3.1. 4024.44 or later | PC or CX (x64) with PL50, e.g. Intel 4-core Atom CPU | Tc3_Vision |