Example "Planar motion components: averting collision"
Using this brief guide you will create a TwinCAT project that contains a Planar mover whose travel command is rejected due to a collision with the Planar environment.
Creating a Planar mover
- See Configuration.
- 1. Create a Planar mover.
- 2. Put “Parameter (Init)” into simulation mode (
TRUE). The parameter is hidden and only becomes visible if the “Show Hidden Parameters” checkbox is activated.
Creating a Planar environment
- 3. Create a Planar environment, see Configuration.
Creating a Planar group
- 4. Create a Planar group, see Configuration.
Creating a PLC
- In order to create the geometry of the environment and control the mover, a PLC must be created from which the user can send commands to both.
- 5. Add the libraries Tc3_Physics and Tc3_Mc3PlanarMotion to the PLC project, see Inserting libraries.
- 6. Create an MC_PlanarMover and an MC_PlanarEnvironment via MAIN.
- These represent the mover and the environment in the MC Configuration.

PROGRAM MAIN
VAR
mover : MC_PlanarMover;
environment : MC_PlanarEnvironment;
group : MC_PlanarGroup;
feedback : MC_PlanarFeedback;
state : UDINT;
target_position : PositionXYC;
END_VARIn this example you have created a state variable for a simple state machine and a target position for a travel command of the mover, with which a sequence can subsequently be programmed in the MAIN:
CASE state OF
0:
environment.AddStator(0,-120.0,-120.0);
environment.CreateBoundary(0);
state := 1;
1:
mover.Enable(0);
group.Enable(0);
state := 2;
2:
IF mover.MCTOPLC.STD.State = MC_PLANAR_STATE.Enabled AND
group.MCTOPLC_STD.State = MC_PLANAR_STATE.Enabled THEN
state := 3;
END_IF
3:
mover.AddToGroup(0,group);
environment.AddToGroup(0,group);
state := 4;
4:
IF mover.MCTOPLC.STD.GroupOID > 0 AND
environment.MCTOPLC_STD. GroupOID > 0 THEN
state := 5;
END_IF
5:
target_position.SetValuesXY(100, 100);
mover.MoveToPosition(feedback, target_position, 0, 0);
state := 6;
END_CASEThis program code activates the mover and creates an environment from a tile on which the mover is located. An attempt is then made to move the mover to the position x = 100 and y = 100.
Sending the command
- 7. In order to issue the command and monitor the feedback, you must call the objects cyclically with their update methods after the END_CASE:
mover.Update();
environment.Update();
group.Update();
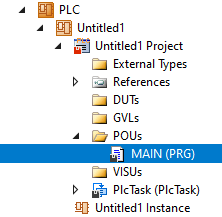
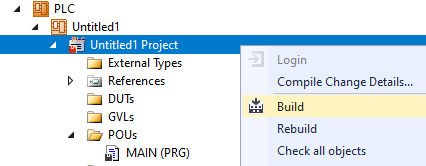
feedback.Update();When creating the PLC, a symbol of the "PLC Mover" is created, which can then be linked to the mover instance in the MC project.
- 1. To build, use the path PLC > Untitled1 > Untitled1 Project > Build.
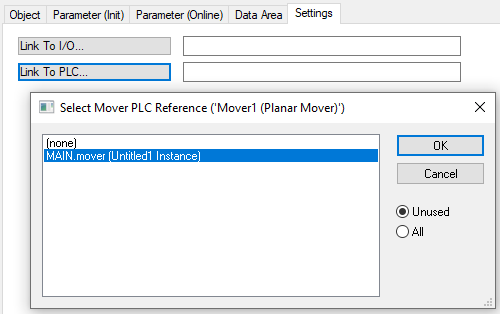
- Subsequently, the Planar mover in the “MC Project” (double-click) can be linked with the Link To PLC... button on the Settings tab.
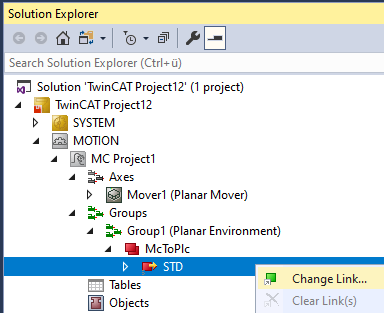
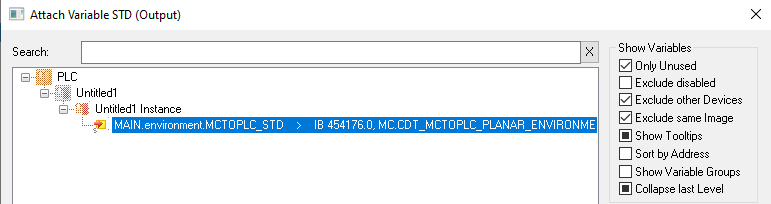
- Subsequently, the Planar environment can be linked via the following dialog boxes in the “MC Project”.
- The group is linked in the same way.
Activating and starting the project
- 1. Activate the configuration via the button in the menu bar
 .
. - 2. Set the TwinCAT system to the "Run" state via the button
 .
. - 3. Log in the PLC via the button in the menu bar
 .
. - 4. Start the PLC via the Play button in the menu bar.
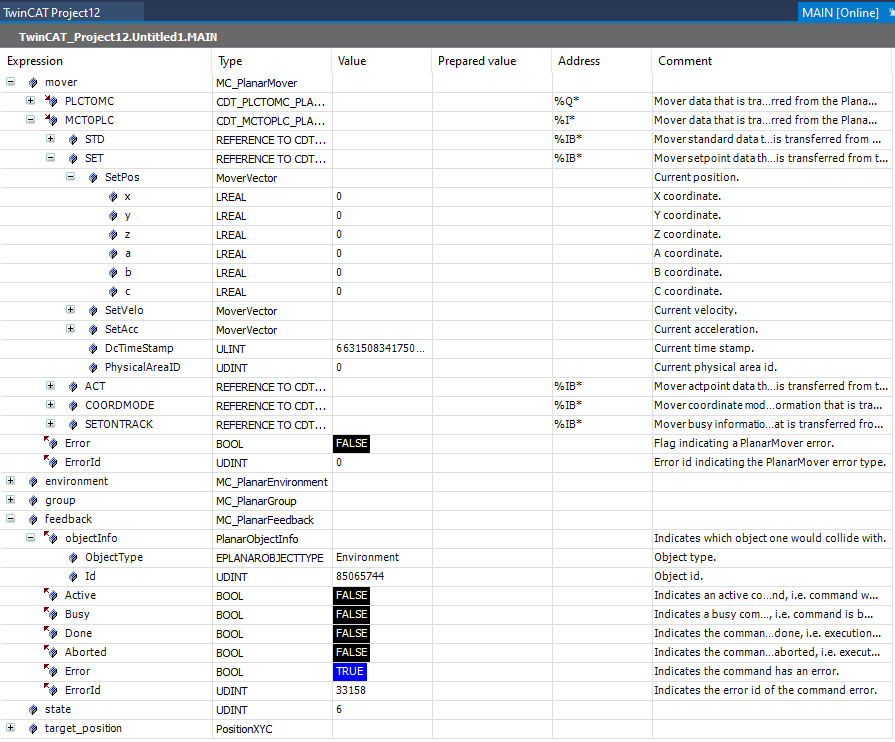
At the end of the state machine (state=6), the mover is in the desired position. The mover did not move because the command was rejected. The feedback shows a collision error and the environment is specified as the collision partner in the ObjectInfo.