MC_MoveCircularAbsolutePreparation

TF5410 | TF5420 | |
|---|---|---|
| MC Group with Pick-and-Place | MC Group Coordinated Motion |
|
|
|

 up to and including v3.2)
up to and including v3.2)The MC_MoveCircularAbsolutePreparation function block adds an absolute circular motion to the table of segments in the MC_PATH_DATA_REF structure. After creating a table, it can be executed via MC_MovePath. The MC_MoveCircularAbsolutePreparation function block can be called multiple times per cycle.
 | Resetting a table A table is not reset during execution. To reset, the ClearPath method must be called from MC_PATH_DATA_REF. |
 Inputs
Inputs
VAR_INPUT
CircMode : MC_CIRC_MODE := mcCircModeInvalid;
AuxPoint : POINTER TO MC_LREAL;
AuxPointCount : UDINT;
EndPoint : POINTER TO MC_LREAL;
EndPointCount : UDINT;
PathChoice : MC_CIRC_PATHCHOICE := mcCircPathchoiceCounterClockwise;
Velocity : MC_LREAL := MC_INVALID;
Acceleration : MC_LREAL := MC_DEFAULT;
Deceleration : MC_LREAL := MC_DEFAULT;
Jerk : MC_LREAL := MC_DEFAULT;
BufferMode : MC_BUFFER_MODE := mcAborting;
TransitionMode : MC_TRANSITION_MODE := mcTransModeNone;
TransitionParameter : POINTER TO MC_LREAL;
TransitionParameterCount : UDINT;
InvokeId : UDINT;
DynamicConstraints : REFERENCE TO IPlcDynamicConstraint := 0;
END_VARName | Type | Description |
|---|---|---|
CircMode | MC_CIRC_MODE | Specifies which circle definition is used to program the circle. Specifies the meaning of the "AuxPoint" input signal (see MC_CIRC_MODE). |
AuxPoint | POINTER TO MC_LREAL | Pointer to an array [1..AuxPointCount] of the AuxPoint vector. The interpretation of the AuxPoint vector depends on the spatial axes convention (see MC Group Coordinated Motion). |
AuxPointCount | UDINT | Dimension of the AuxPoint vector. |
EndPoint | POINTER TO MC_LREAL | Pointer to an array [1..EndPointCount] of the target position vector. |
EndPointCount | UDINT | Dimension of the EndPoint vector. Must match the number of axes in the axis convention (see MC Group Coordinated Motion or MC Group with Pick-and-Place). |
PathChoice | MC_CIRC_PATHCHOICE | Defines the direction of rotation with respect to the normal vector. The input is ignored if the input CircMode is set to mcCircModeBorder (see MC_CIRC_PATHCHOICE). |
Velocity | MC_LREAL | The maximum velocity for the programmed segment. The velocity does not always have to be reached. The velocity must be set >0. |
Acceleration | MC_LREAL | Maximum path acceleration for the programmed segment. Special input values can be used. MC_DEFAULT executes the command with default axis values. MC_MAXIMUM executes the command with the maximum axis values. The acceleration must be set ≥1. |
Deceleration | MC_LREAL | Maximum path deceleration for the programmed segment. Special input values can be used. MC_DEFAULT executes the command with default axis values. MC_MAXIMUM executes the command with the maximum axis values. The deceleration must be set ≥1. |
Jerk | MC_LREAL | Path jerk for the programmed segment. Special input values can be used. MC_DEFAULT executes the command with default axis values. The jerk must be set ≥100. |
BufferMode | MC_BUFFER_MODE | Defines how successive motion commands are to be processed (see MC_BUFFER_MODE). |
Transition mode | MC_TRANSITION_MODE | Defines the blending mode (see MC_TRANSITION_MODE). |
TransitionParameter | POINTER TO MC_LREAL | Pointer to array [1..TransitionParameterCount] of blending parameters. Transition parameters define the blending from the last programmed position (see MC_TRANSITION_MODE). |
TransitionParameterCount | UDINT | Number of blending parameters. |
InvokeId | UDINT | Segment ID for analysis purposes. |
DynamicContraints | REFERENCE TO IPlcDynamicConstraint | From TF5400 V3.2.27, MC Group Coordinated Motion:
|
 Inputs/outputs
Inputs/outputs
VAR_IN_OUT
PathData : MC_PATH_DATA_REF;
END_VARName | Type | Description |
|---|---|---|
PathData | MC_PATH_DATA_REF | Table containing the segments of a path. The table is written by MC_Move…Preparation and executed by MC_MovePath (see MC_PATH_DATA_REF). |
 Outputs
Outputs
VAR_OUTPUT
Error : BOOL;
ErrorId : UDINT;
END_VARName | Type | Description |
|---|---|---|
Error | BOOL | This output becomes TRUE if an error has occurred during command execution. |
ErrorId | UDINT | Contains the command-specific error code of the last executed command. Details of the error code can be found in the ADS error documentation or in the NC error documentation (error codes 0x4nnn and 0x8nnn). |
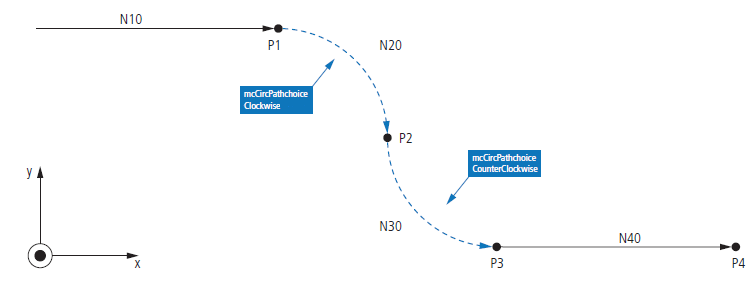
Sample of center point programming
Assuming a path consisting of 4 segments as shown in the figure is to be programmed in mcCircModeCenter mode: the user defines the center of the circle as an auxiliary point ("AuxPoint"). When using mcCircModeCenter, the input MC_CIRC_PATHCHOICE determines the direction of rotation. Since the plane is defined by the cross product, mcCircPathchoiceCounterClockwise must be selected for both circle segments N20 and N30.
VAR
Buffer : ARRAY[1..4096] OF BYTE;
Path : MC_PATH_DATA_REF (ADR(buffer), SIZEOF(buffer));
fbMoveLinPrep : MC_MoveLinearAbsolutePreparation;
fbMoveCircPrep : MC_MoveCircularAbsolutePreparation;
aTargetPos : ARRAY[1..cAxesCount] OF MC_LREAL;
aCircPos : ARRAY[1..cAxesCount] OF MC_LREAL;
aAuxPoint : ARRAY[1..3] OF MC_LREAL;
aTransitionParam : ARRAY[1..2] OF MC_LREAL;
END_VAR
VAR CONSTANT
cAxesCount : UINT:=3;
END_VAR fbMoveLinPrep.Position := ADR(aTargetPos);
fbMoveLinPrep.PositionCount := cAxesCount;
fbMoveLinPrep.TransitionParameter := ADR(aTransitionParam);
fbMoveLinPrep.TransitionParameterCount := 2;
fbMoveLinPrep.BufferMode := mcBuffered;
fbMoveLinPrep.TransitionMode := mcTransModeNone;
fbMoveCircPrep.EndPoint := ADR(aTargetPos);
fbMoveCircPrep.EndPointCount := cAxesCount;
fbMoveCircPrep.AuxPoint := ADR(aAuxPoint);
fbMoveCircPrep.AuxPointCount := 3;
fbMoveCircPrep.CircMode := mcCircModeCenter;
fbMoveCircPrep.TransitionParameter := ADR(aTransitionParam);
fbMoveCircPrep.TransitionParameterCount := 2;
fbMoveCircPrep.BufferMode := mcBuffered;
fbMoveCircPrep.TransitionMode := mcTransModeNone;
aTargetPos[1] := 200;
aTargetPos[2] := 0;
aTargetPos[3] := 0;
aTransitionParam[1] := 0;
aTransitionParam[2] := 0;
fbMoveLinPrep(PathData:= path, Velocity:= 3000, InvokeId:= 10);
aTargetPos[1] := 300;
aTargetPos[2] := -100;
aTargetPos[3] := 0;
aAuxPoint[1] := 200;
aAuxPoint[2] := -100;
aAuxPoint[3] := 0;
aTransitionParam[1] := 0;
aTransitionParam[2] := 0;
fbMoveCircPrep(PathData:= path, PathChoice:= mcCircPathchoiceClockwise, Velocity:= 1000, InvokeId:= 20);
aTargetPos[1] := 400;
aTargetPos[2] := -200;
aTargetPos[3] := 0;
aAuxPoint[1] := 400;
aAuxPoint[2] := -100;
aAuxPoint[3] := 0;
aTransitionParam[1] := 0;
aTransitionParam[2] := 0;
fbMoveCircPrep(PathData:= path, PathChoice:= mcCircPathchoiceCounterClockwise, Velocity:= 1000, InvokeId:= 30);
aTargetPos[1] := 600;
aTargetPos[2] := -200;
aTargetPos[3] := 100;
aTransitionParam[1] := 0;
aTransitionParam[2] := 0;
fbMoveLinPrep(PathData:= path, Velocity:= 3000, InvokeId:= 40);Requirements
Development environment | Target platform | PLC libraries |
|---|---|---|
TwinCAT V3.1.4018.26 TF5400 Advanced Motion Pack V3.1.2.47 | PC or | Tc3_McCoordinatedMotion, Tc2_MC2 |