MC_CIRC_MODE
TF5410 | TF5420 | |
|---|---|---|
| MC Group with Pick-and-Place | MC Group Coordinated Motion |
|
|
|

 up to and including v3.2)
up to and including v3.2)The circle mode determines which circle definition is used to program a circle.
TYPE MC_CIRC_MODE :
(
mcCircModeInvalid := 16#0000,
mcCircModeBorder := 16#2000,
mcCircModeCenter := 16#2001,
mcCircModeRadius := 16#2002
)
END_TYPE mcCircModeInvalid
Returns errors
|
|
mcCircModeBorder
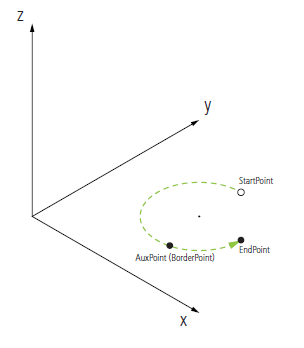
StartPoint
|
|
EndPoint
|
|
AuxPoint
|
|
PathChoice
|
|
Applicability |
|
mcCircModeCenter
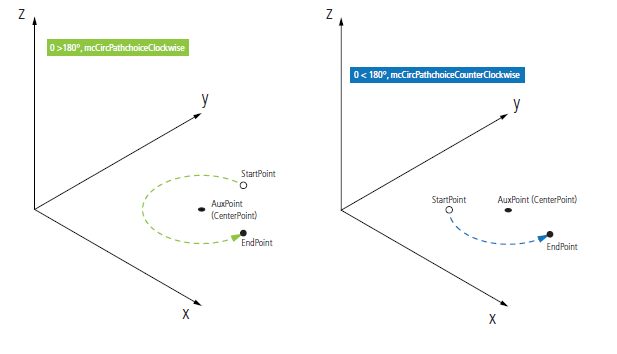
StartPoint
|
|
EndPoint
|
|
AuxPoint
|
|
|
|
PathChoice
|
|
Applicability
|
|
|
|
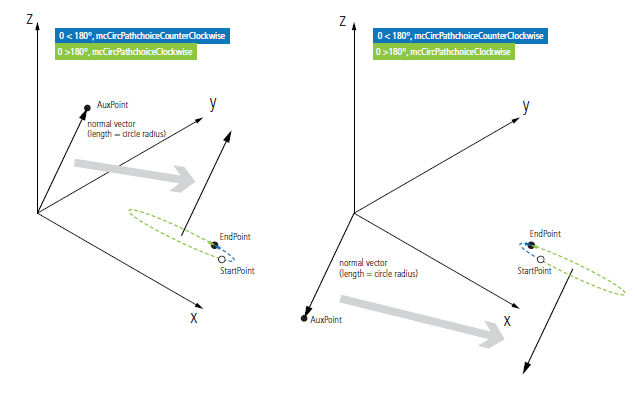
mcCircModeRadius

Images |
|
StartPoint |
|
|
|
|
|
|
|
AuxPoint Normal Vector |
|
EndPoint |
|
|
|
|
|
|
|
PathChoice and resulting arc |
|
|
|
|
|
|
|
Applicability |
|
Requirements
Development environment | Target platform | PLC libraries |
|---|---|---|
TwinCAT V3.1.4018.26 TF5400 Advanced Motion Pack V3.1.2.47 | PC or | Tc3_McCoordinatedMotion, Tc2_MC2 |