FB_AX2000_Parameter
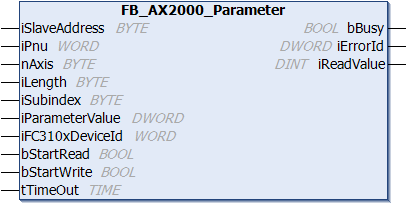
The function block FB_AX2000_Parameter is used to write/read the data for parameterizing the drive.
 | Please note that the "STOP" input of the AX2000AXACT function block must remain TRUE while writing a parameter to change the operation mode. |
 Inputs
Inputs
VAR_INPUT
iSlaveAddress : BYTE := 0;(* Station Address of the Slave *)
iPnu : WORD := 16#03A2;(* Parameter-Number *)
nAxis : BYTE := 1;(* Number of Axis *)
iLength : BYTE := 4;(* Length of the parameter (2 or 4) *)
iSubIndex : BYTE;
iParameterValue : DWORD := 2;(* Parameter value *)
iFC310xDeviceId : WORD := 1;(* Device-ID of the FCxxxx *)
bStartRead : BOOL;(* StartFlag to start the PKW-Read *)
bStartWrite : BOOL;(* StartFlag to start the PKW-Write *)
tTimeOut : TIME := DEFAULT_ADS_TIMEOUT;
END_VARName | Type | Description |
|---|---|---|
iSlaveAddress | BYTE | Station address |
iPnu | WORD | Selection of the parameter to be read or written. List of the available parameter numbers. |
nAxis | BYTE | Axis ID |
iLength | BYTE | Length of the parameter (2 or 4) |
iSubIndex | BYTE |
|
iParameterValue | DWORD | Value of the parameter to be read or written. |
iFC310xDeviceId | WORD | Device-ID |
bStartRead | BOOL | A positive edge at this Boolean input sends a start command to the axis to read the parameter selected with 'Pnu'. |
bStartWrite | BOOL | A positive edge at this Boolean input sends a start command to the axis to write the parameter selected with 'Pnu'. When changing the operation mode, the write command is only effective with Stop=TRUE on the FB_AX2000_AXACT function block. |
tTimeOut | BOOL | Maximum time allowed for the execution of the command. |
 Outputs
Outputs
VAR_OUTPUT
bBusy :BOOL;
iErrorId :DWORD;
iReadValue :DINT;
END_VARName | Type | Description |
|---|---|---|
bBusy | BOOL | This output remains TRUE until the function block has executed a command. While Busy = TRUE, no new command will be accepted at the inputs. Note that it is not the execution of the service that is monitored in terms of time, but only its acceptance. |
iErrorId | DWORD | Contains the command-specific error code of the most recently executed command. Is reset to 0 by the execution of a command at the inputs. |
iReadValue | DINT | Parameter value as a response to the "StartRead" command. |
Requirements
Development environment | Target platform | IO hardware | PLC libraries to be integrated (category group) |
|---|---|---|---|
TwinCAT v3.1.0 | PC or CX (x86) | AX2000 Profibus box | Tc2_IoFunctions (IO) |