Controller optimization
The parameters of the control loops are fundamentally preset when scanning the motor. The parameters are optimized during the controller optimization.
Aims of the controller optimization:
- Align the actual position with the target position: Minimize following errors.
- Aligning the actual velocity to the target velocity.
- Reduce overshoot and undershoot.
Observe the "Torque actual value" during controller optimization. This allows you to detect at an early stage whether the system is prone to oscillations.
Preparation
- Requirement: the test run was successfully performed.
- 1. Establish load conditions as in the real application.
Controller optimization without load is not useful, because the motor behavior is different in this case. - 2. If necessary, increase the permissible following error. See chapter CSP (position control).
- 3. Activate TwinCAT configuration.
- 4. Create a Scope project in TwinCAT.
- 5. Select the following variables from the "Target browser" to display them in the Scope:
Position Lag
0x1A03 Torque actual value
From the TwinCAT NC:
Position setpoint
Position actual value
Velocity setpoint
Velocity actual value - 6. In the Solution Explorer, click the axis.
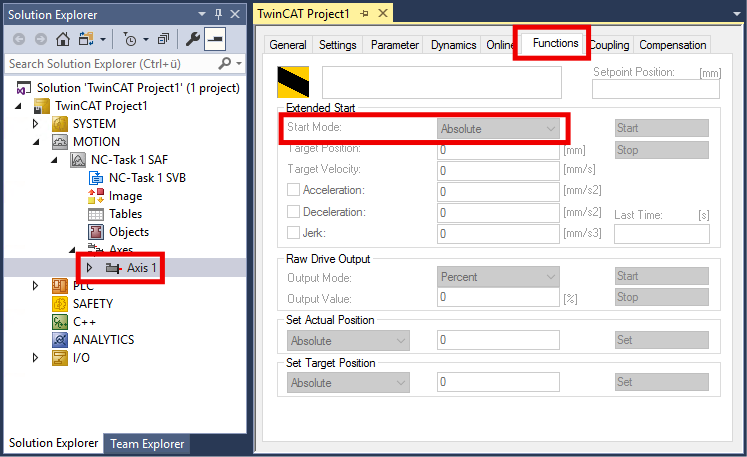
- 7. Click the "Functions" tab.
- 8. In the drop-down menu "Start Mode": select "Reversing Sequence".
- 9. Adjust dynamics and velocity as needed in the real application.
The further procedure depends on which feedback is connected and configured:
- No feedback, sensorless operation
- Hall sensors only
- An incremental encoder and optional Hall sensors