MDP742 process data
Table of contents |
|---|
Sync Manager (SM)
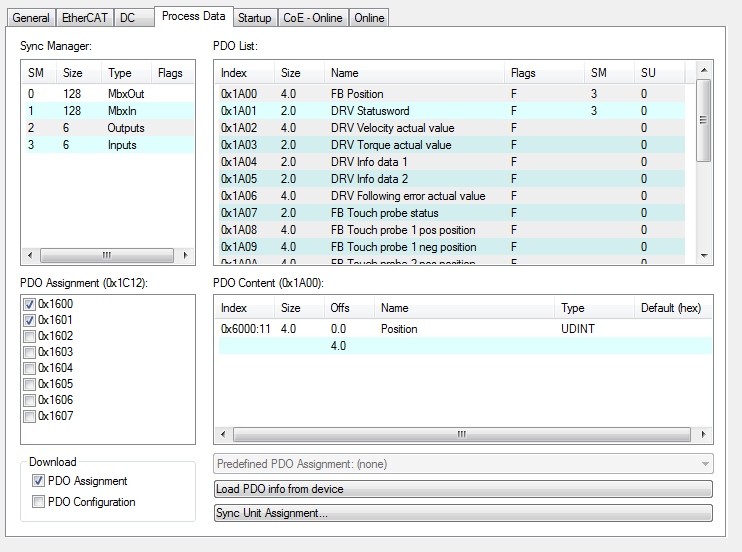
Sync Manager (SM) The extent of the process data that is made available can be changed through the "Process data" tab (see following Fig.).
PDO Assignment
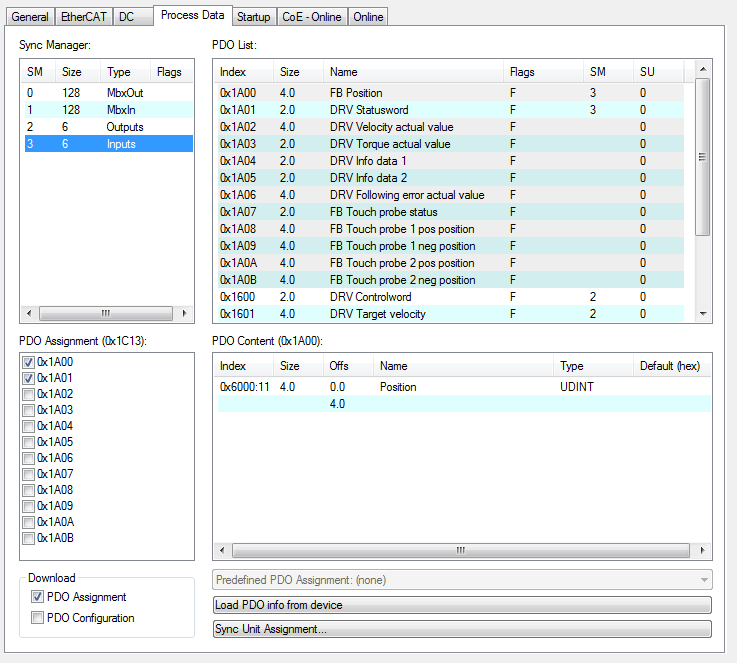
- To configure the process data, select the required Sync Manager (SM2 or SM3) in the "Sync Manager" field at the top left (see Fig. Process Data tab SM3, EL72x1-0010).
- The process data assigned to this Sync Manager can then be switched on or off in the “PDO Assignment” box underneath.
- Restarting the EtherCAT system, or reloading the configuration in configuration mode (F4), causes the EtherCAT communication to restart, and the process data is transferred from the terminal.
SM2, PDO assignment 0x1C12
Index | Size (byte.bit) | Name | PDO content |
|---|---|---|---|
0x1600 (default) | 2.0 | DRV Controlword | 0x7010:01 - Controlword (2.0) |
0x1601 (default) | 4.0 | DRV Target velocity | 0x7010:06 - Target velocity (4.0) |
0x1602 | 2.0 | DRV Target torque | 0x7010:09 - Target torque (2.0) |
0x1603 | 2.0 | DRV Commutation angle | 0x7010:0E - Commutation angle (2.0) |
0x1604 | 2.0 | DRV Torque limitation | 0x7010:0B - Torque limitation (2.0) |
0x1605 | 2.0 | DRV Torque offset | 0x7010:0A - Torque offset (2.0) |
0x1606 | 4.0 | DRV Target position | 0x7010:05 - Target position (4.0) |
0x1607 | 2.0 | FB Touch probe control | 0x7001:01 - Touch probe function_TP1 Enable (0.1) 0x7001:09 - Touch probe function_TP2 Enable (0.1) |
0x1608 | 1.0 | DRV Modes of operation | 0x7010:03 - Modes of operation (1.0) |
0x1630* | 40.0 | DMC Outputs | 0x7030:02 - DMC_FeedbackControl_Enable latch extern on positive edge (0.1) 0x7030:11 - DMC_DriveControl_Enable (0.1) 0x7030:21 - DMC_PositioningControl_Execute (0.1) 0x7030:31 - DMC_Set counter value (8.0) |
0x1630* | 40.0 | DMC Outputs 32 Bit | 0x7030:02 - DMC_FeedbackControl_Enable latch extern on positive edge (0.1) 0x7030:11 - DMC_DriveControl_Enable (0.1) 0x7030:21 - DMC_PositioningControl_Execute (0.1) 0x7030:31 - DMC_Set counter value (4.0) |
*) from firmware 19
SM3, PDO assignment 0x1C13
Index | Size (byte.bit) | Name | PDO content |
|---|---|---|---|
0x1A00 (default) | 4.0 | FB Position | 0x6000:11 - Position (4.0) |
0x1A01 (default) | 2.0 | DRV Statusword | 0x6010:01 - Statusword (2.0) |
0x1A02 | 4.0 | DRV Velocity actual value | 0x6010:07 - Velocity actual value (4.0) |
0x1A03 | 2.0 | DRV Torque actual value | 0x6010:08 - Torque actual value (2.0) |
0x1A04 | 2.0 | DRV Info data 1 | 0x6010:12 - Info data 1 (2.0) |
0x1A05 | 2.0 | DRV Info data 2 | 0x6010:13 - Info data 2 (2.0) |
0x1A06 | 4.0 | DRV Following error actual value | 0x6010:09 - Following error actual value (4.0) |
0x1A07 | 2.0 | FB Touch probe status | 0x6001:01 - Touch probe status_ TP1 Enable (0.1) 0x6001:09 - Touch probe status_ TP2 Enable (0.1) |
0x1A08 | 4.0 | FB Touch probe 1 pos. position | 0x6001:11 - TP1 Pos position (4.0) |
0x1A09 | 4.0 | FB Touch probe 1 neg. position | 0x6001:12 - TP1 Neg position (4.0) |
0x1A0A | 4.0 | FB Touch probe 2 pos. position | 0x6001:13 - TP2 Pos position (4.0) |
0x1A0B | 4.0 | FB Touch probe 2 neg. position | 0x6001:14 - TP2 Neg position (4.0) |
0x1A0C | 2.0 | FB Status | 0x6000:0E - Status_TxPDO State (0.1) |
0x1A0E | 1.0 | DRV Modes of operation display | 0x6010:03 - Modes of operation display (1.0) |
0x1A30* | 64.0 | DMC Inputs | 0x6030:02 - DMC_FeedbackStatus_Latch extern valid (0.1) 0x6030:11 - DMC_DriveStatus_Ready to enable (0.1) 0x6030:21 - DMC_PositioningStatus_Busy (0.1) 0x6030:31 - DMC_Set position (8.0) |
Index | Size (byte.bit) | Name | PDO content |
|---|---|---|---|
0x1A31* | 64.0 | DMC Inputs 32 Bit | 0x6030:02 - DMC_FeedbackStatus_Latch extern valid (0.1) 0x6030:11 - DMC_DriveStatus_Ready to enable (0.1) 0x6030:21 - DMC_PositioningStatus_Busy (0.1) 0x6030:31 - DMC_Set position (4.0) |
*) from firmware 19
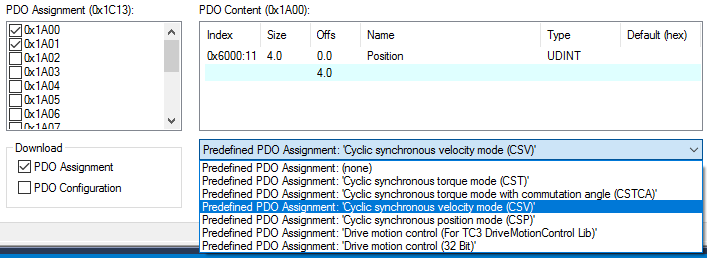
Predefined PDO Assignment
The "Predefined PDO Assignment" enables a simplified selection of the process data. The desired function is selected on the lower part of the "Process Data" tab. As a result, all necessary PDOs are automatically activated and the unnecessary PDOs are deactivated.
Six PDO assignments are available:
Name | SM2, PDO assignment | SM3, PDO assignment |
|---|---|---|
Cyclic synchronous velocity mode | 0x1600 (DRV Controlword) 0x1601 (DRV Target velocity) | 0x1A00 (FB Position) 0x1A01 (DRV Statusword) |
Cyclic synchronous torque mode | 0x1600 (DRV Controlword) 0x1602 (DRV Target torque) | 0x1A00 (FB Position) 0x1A01 (DRV Statusword) 0x1A03 (DRV Torque actual value) |
Cyclic synchronous torque mode with commutation angle | 0x1600 (DRV Controlword) 0x1602 (DRV Target torque) 0x1603 (DRV Commutation angle) | 0x1A01 (DRV Statusword) |
Cyclic synchronous position mode | 0x1600 (DRV Controlword) 0x1606 (DRV Target position) | 0x1A00 (FB Position) 0x1A01 (DRV Statusword) 0x1A06 (DRV Following error actual value) |
Drive motion control (For TC3 DriveMotionControl Lib)* | 0x1630 (DMC Outputs) | 0x1A30 (DMC Inputs) |
Drive motion control (32 Bit)* | 0x1631 (DMC Outputs 32 Bit) | 0x1A31 (DMC Inputs 32 Bit) |
*) from firmware 19