Scan Feedback
The following parameters are determined during the "Scan Feedback" operation:
- The counting direction of the encoder: parameter 0x8008:01 "Invert feedback direction".
- The arrangement of the Hall sensors in the motor: parameter 0x800A:12 "Phasing".
- The commutation offset of the Hall sensors: Parameter 0x800A:13 "Hall commutation adjust".
The following parameters are checked for plausibility during the scan procedure:
- 0x8008:13 "Encoder increments per Revolution"
- 0x8011:13 "Motor pole pairs"
Executing the scan
| |
The motor shaft moves during the scan procedure Injuries and damage to property are possible.
|

- 1. Ensure that all other feedback parameters are set correctly.
See chapter Configuration of the feedback. - 2. Make sure that all motor parameters and amplifier parameters are set correctly.
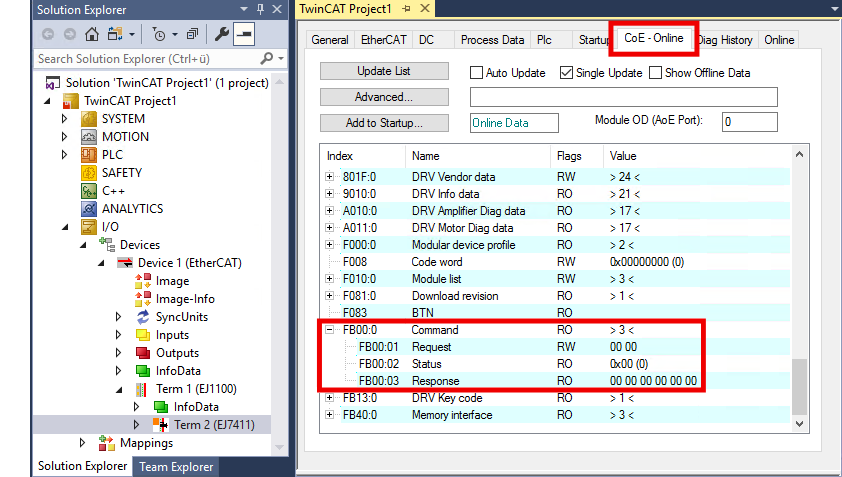
See chapter Configuration of the motor and the amplifier. - 3. Write the command 0x8008 into the register 0xFB00:01 "Request".
- The scan runs.
- The value of register 0xFB00:02 "Status" indicates the progress of the scan.
The values 100dec … 199dec correspond to 0 ... 99 %. - 4. Wait until register 0xFB00:02 "Status" has one of the following values: 0, 1, 2, 3.
- Value 0: the scan has been successfully completed.
- Value 3: error. See chapter Error diagnosis.