Configuration of the motor and amplifier
Before integrating the motor into the NC it is important to make some settings in the CoE objects 0x8010:xx and 0x8011:xx. This information must be entered and, for the most part, taken from the data sheet or measured.
Contact the motor manufacturer if any information is missing from the data sheet.
Index 0x8010: DRV Amplifier Settings
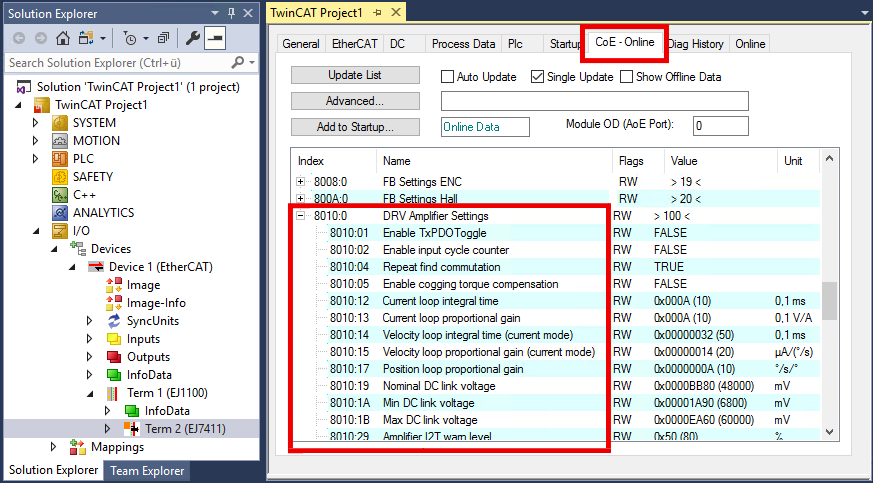
Index (hex) | Name | Description | Unit |
|---|---|---|---|
8010:04 | Repeat find commutation | This parameter is only relevant if you are using an incremental encoder. If this parameter is TRUE, the commutation angle is determined each time the axis is enabled. 1) If this parameter is FALSE, the commutation angle is determined only if it is necessary, e.g. after a power cycle of the module. | - |
8010:19 | Nominal DC link voltage | Enter here the amount of load voltage in millivolts that you have connected to pins 25 to 28. Value range: 8…48 VDC | mV |
8010:64 | Commutation type | Set feedback. See chapter Configuration of the feedback. | - |
1) There are scenarios in which commutation determination must be repeated as soon as the orientation of the feedback to the motor is no longer known. Possible causes are a power cycle of the encoder or an interim change of operation mode.
Index 8011: DRV Motor Settings
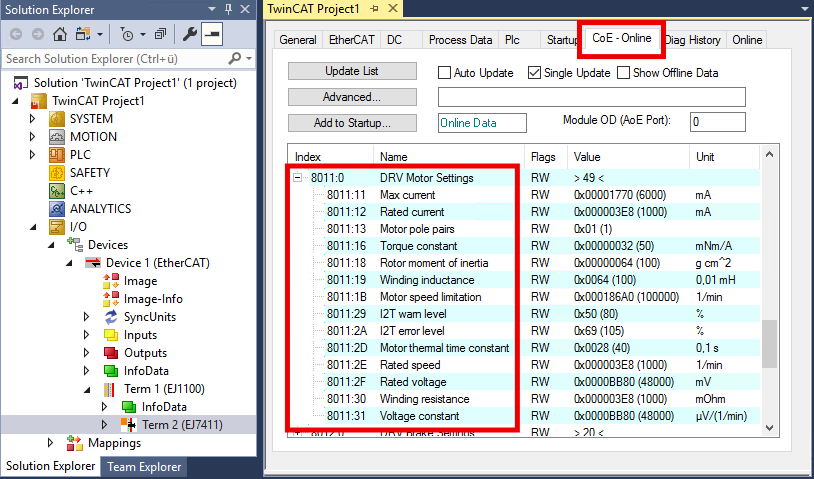
Index (hex) | Name | Description | Unit |
|---|---|---|---|
8011:11 | Max current | The maximum peak value of the winding current. This value is the maximum current with which the motor can be loaded for a short time. | mA |
8011:12 | Rated current | The nominal current of the motor. The nominal current is the maximum current with which the motor can be permanently loaded. | mA |
8011:13 | Motor pole pairs | Number of pole pairs. If only the number of poles is specified in the data sheet, divide this value by two to get the number of pole pairs. For linear axes, see chapter: Special case - linear axis. | - |
8011:16 | Torque constant | Output torque per current intensity. | mNm/A |
8011:18 | Rotor moment of inertia | The moment of inertia from the point of view of the motor. Enter the entire moment of inertia of the rotor and the associated mechanism. | g cm² |
8011:19 | Winding inductance | The winding inductance. You can have this value measured automatically. See chapter Scan Motor. | mH |
8011:2D | Motor thermal time constant | The thermal time constant of the winding. This value is relevant for the calculation of the I²T model. | 0.1 s |
8011:2E | Rated speed | The nominal speed of the motor at the nominal voltage. | rpm |
8011:2F | Rated voltage | The nominal voltage of the motor according to the manufacturer's specification. | mV |
8011:30 | Winding resistance | The winding resistance, measured between two motor phases. You can also have this value measured automatically. See chapter Scan Motor. | mΩ |
8011:31 | Voltage constant | The voltage constant of the motor. The counter-electromotive force of the motor depends on the speed. The voltage constant establishes a relationship between the two values. This value is important for the correct control of the motor. | µV / min-1 |