Statisch gesteuerte Corefunctions
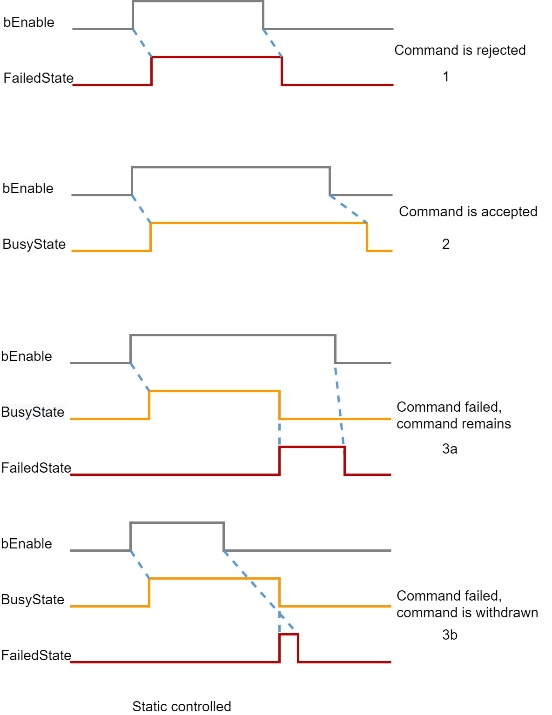
Das Kommando, das von diesen Corefunctions akzeptiert wird, heißt normalerweise bEnable.
Die steigende Flanke von bEnable löst eine Reihe von Überprüfungen aus, um festzustellen, ob die Ausführungsbedingungen erfüllt sind. Wenn die Ausführungsbedingungen nicht erfüllt sind, wird das Kommando abgelehnt und die Corefunction geht in den FailedState über (Fall 1 in der Abbildung unten). Wenn die Ausführungsbedingungen erfüllt sind, wird das Kommando akzeptiert und die Corefunction geht in den BusyState über. Die fallende Flanke von bEnable löst eine Antwort aus, um die Ausführung zu beenden (Fall 2 unten).
Wenn bei der Ausführung des Kommandos ein Fehler auftritt, geht die Corefunction in den FailedState über (Fall 3 unten). Zu diesem Zeitpunkt wird geprüft, ob bEnable noch TRUE ist und der Zustand der Corefunction im nächsten SPS-Zyklus geändert.
Die folgenden Corefunctions sind statisch gesteuert:
Corefunction | Beschreibung |
|---|---|
Dient zur Aktivierung der Sollwertgenerierung, die durch eine Führungsgröße gesteuert wird. | |
Wird intern zur Sollwertgenerierung durch TwinCAT 3 Plastic Technology Functions verwendet. | |
Wird verwendet, um eine Bewegung ohne ein bestimmtes Ziel zu kommandieren. | |
Reserviert für zukünftige Erweiterung. | |
Wird verwendet, um eine Bewegung ohne vorgegebenes Ziel und mit einer Geschwindigkeit zu aktivieren, die durch eine Führungsgröße gesteuert wird. | |
Eine spezielle Corefunction für hydraulische Achsen. Sie wird verwendet, um das charakteristische Geschwindigkeitsverhalten der Achse zu ermitteln. | |
Eine spezielle Corefunction für hydraulische Achsen. Sie wird verwendet, um Ausgangssignale direkt an das Steuergerät zu senden. | |
Eine spezielle Corefunction für transformierende Achsen. Sie wird für die Kopplung der beiden internen Achsen einer transformierenden Achse verwendet. |
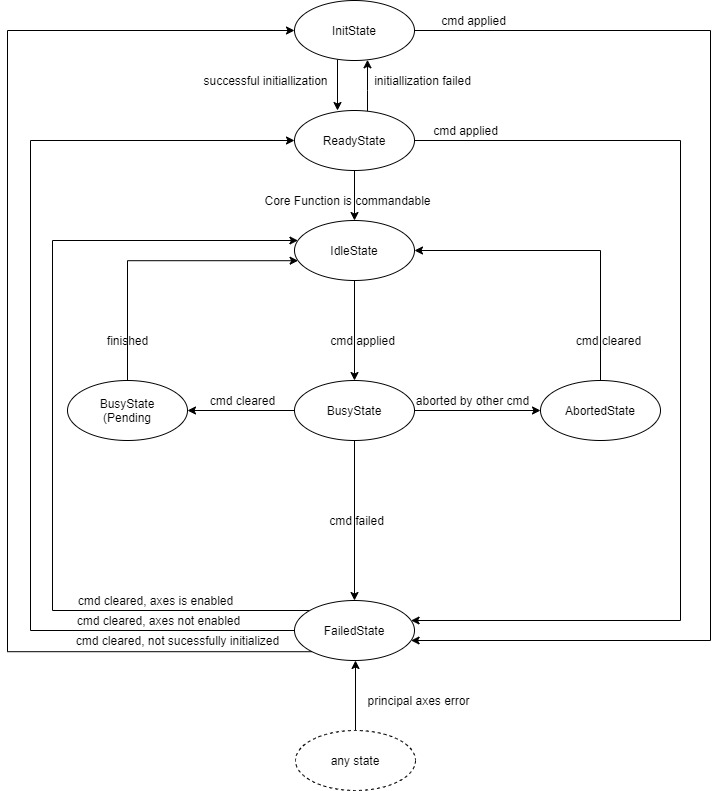
Timing Diagram
State-Machine