FB_MTP_AnaDrv
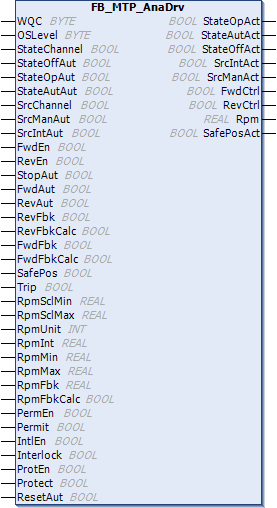
Der Funktionsbaustein FB_MTP_AnaDrv ist ein Objekt zur Steuerung eines Antriebs mit variabler Drehzahl von unterschiedlichen Quellen: interne SPS-Logik oder manuelle Bedienung (z.B. über OPC-UA). Schaltanfragen und Wertvorgaben werden unabhängig voneinander über die Zustandsautomaten des Operation Mode und des Source Mode verwaltet. Die OPC-UA-Zugriffsrechte sind in den Variablentabellen beschrieben.
Ansteuern des Antriebs
Die Vorgabe der Drehrichtung des Antriebs erfolgt über die Schaltanfragen Fwd*, Rev* und Stop*. Der Zustandsautomat des Operation Mode verwaltet, ob und von welcher Quelle neue Schaltanfragen verarbeitet werden. Bei gleichzeitigen Anfragen von Fwd* und Rev* sind beide gleich priorisiert und der Antrieb bleibt in seinem Zustand. Stop* ist bei SafePos = FALSE bei gleichzeitigen Anfragen von Fwd*, Rev* und Stop* am höchsten priorisiert. Ist SafePos = TRUE sind die Schaltanfragen Fwd*, Rev* und Stop* gleich priorisiert und der Antrieb bleibt bei gleichzeitigen Anfragen in seinem aktuellen Zustand.
Bei aktiver Verriegelung ist, je nach Verriegelungsart, ein Steuern des Antriebs nicht mehr möglich.
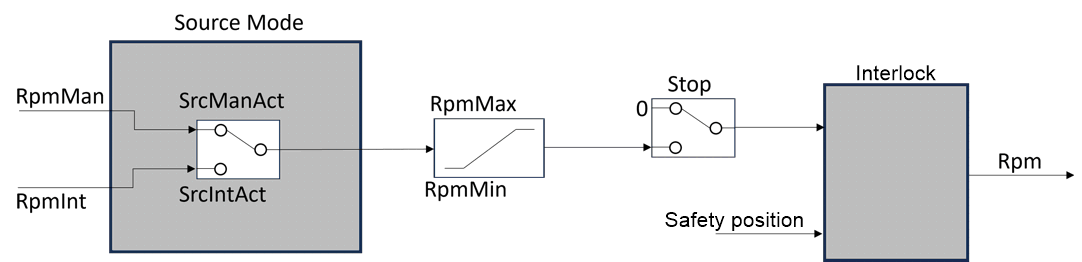
Sollwertvorgabe
Die Drehzahlvorgabe erfolgt über Rpm* Variablen. Die Drehzahlvorgabe wird von dem Zustandsautomaten Source Mode verwaltet und nach dem untenstehenden Schema ausgegeben:
Sicherheitsposition
Die Sicherheitsposition wird über die Variablen SafePos, SafePosDirRpmEn, SafePosDir und SafePosRpm definiert.
Mit der Variablen SafePos wird beschrieben, ob die Sicherheitsposition des Antriebs der energielose Zustand oder ein aktiver Zustand ist.
 | Die Variablen |
Sicherheitsposition: Energieloser Zustand (SafePos = FALSE)
Im Energielosen Zustand ist der Antrieb gestoppt (FwdCtrl = FALSE, RevCtrl = FALSE und Rpm = 0)
Sicherheitsposition: Aktiver Zustand (SafePos = TRUE)
Bei einem aktiven Zustand kann die Vorgabe der Drehrichtung und Drehzahl aktiviert (SafePosDirRpmEn = TRUE) und die Drehrichtung (SafePosDir) bzw. Drehzahl (SafePosRpm) vorgegeben werden.
Wenn SafePosDirRpmEn = FALSE, ist der aktuelle Bewegungszustand (Vorwärts, Rückwärts oder Stopp) die Sicherheitsposition.
Bei aktivierter Vorgabe (SafePosDirRpmEn = TRUE) ist die Sicherheitsposition Vorwärts (SafePosDir = FALSE) oder Rückwärts (SafePosDir = TRUE) mit der definierten Sicherheitsdrehzahl (SafePosRpm).
Nachfolgend finden Sie eine Tabelle mit den Bedienmöglichkeiten des Antriebs (Fwd*, Rev*, Stop* und Rpm*) bei aktivem Permit in Abhängigkeit der Ausgangslage des Antriebs (Antrieb Stoppen, Antrieb in Vorwärtsbewegung setzen und Antrieb in Rückwärtsbewegung setzen) und der definierten Sicherheitsposition:
SafePos | SafePos | SafePosDir | Drive set to Stop | Drive set to Forward | Drive set to Reverse |
|---|---|---|---|---|---|
| - | - |
|
|
|
|
| - |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x: Schaltanfragen und/oder Wertvorgaben werden nicht mehr berücksichtigt
✓: Schaltanfragen und/oder Wertvorgaben werden berücksichtigt
Weitere Eigenschaften
 Eingänge
Eingänge
Name | Typ | Beschreibung | OPC-UA-Zugriff |
|---|---|---|---|
TagName | STRING | Name der Schnittstelle | - |
TagDescription | STRING | Beschreibung der Schnittstelle | - |
WQC | BYTE | Worst Quality Code | Lesen |
OSLevel | BYTE | Level muss für Anlage definiert werden. Wert 0 ist reserviert für lokale Bedienung. | Lesen/schreiben |
State* |
| Siehe Operation Mode |
|
FwdEn | BOOL | Vorwärtsbewegung freigeben: 1: Freigabe 0: Gesperrt | Lesen |
RevEn | BOOL | Rückwärtsbewegung freigeben: 1: Freigabe 0: Gesperrt | Lesen |
StopAut | BOOL |
(Relevant, wenn 1: Stopp ausführen. 0: Kein Stopp | Lesen |
FwdAut | BOOL |
(Relevant, wenn 1: Vorwärtsbewegung ausführen. 0: Keine Vorwärtsbewegung ausführen. | Lesen |
RevAut | BOOL |
(Relevant, wenn 1: Rückwärtsbewegung ausführen. 0: Keine Rückwärtsbewegung ausführen. | Lesen |
FwdFbkCaIc | BOOL | Quelle des Feedback Signals Vorwärtsbewegung: 1: Berechnet 0: Sensor | Lesen |
FwdFbk | BOOL | Feedback Signal Vorwärtsbewegung: 1: Vorwärtsbewegung 0: Keine Vorwärtsbewegung | Lesen |
RevFbkCaIc | BOOL | Quelle des Feedback Signals Rückwärtsbewegung: 1: Berechnet 0: Sensor | Lesen |
RevFbk | BOOL | Feedback Signal Rückwärtsbewegung: 1: Rückwärtsbewegung 0: Keine Rückwärtsbewegung | Lesen |
Src* |
| Siehe Source Mode |
|
RpmInt | REAL |
| Lesen |
RpmUnit | INT | Drehzahl-Einheit | Lesen |
RpmMin | REAL | Oberer Grenzwert des Drehzahl-Sollwerts | Lesen |
RpmMax | REAL | Unterer Grenzwert des Drehzahl-Sollwerts | Lesen |
RpmFbkCalc | BOOL | Quelle des Drehzahl-Istwerts: 1: Berechnet 0: Sensor | Lesen |
RpmFbk | REAL | Drehzahl-Istwert | Lesen |
RpmSclMin | REAL | Drehzahl-Skalenanfang | Lesen |
RpmSclMax | REAL | Drehzahl-Skalenende | Lesen |
Perm* Int* Prot* |
| Siehe Verriegelung |
|
Trip | BOOL | Meldekontakt Motorschutz: 1: Kein Fehler 0: Motorschutz angesprochen. | Lesen |
SafePos | BOOL | 1: Behalte aktuellen Zustand bei. 0: Stopp | Lesen |
SafePosDirRpmEn | BOOL | 1: Drehrichtungsvorgabe für 0: keine Drehrichtungsvorgabe | - |
SafePosDir | BOOL | Drehrichtungsvorgabe für 1: Rückwärts 0: Vorwärts | - |
SafePosRpm | REAL | Drehzahlvorgabe für Sicherheitsposition, wenn | - |
ResetAut | BOOL |
1: Reset angefordert. 0: Kein Reset angefordert. | Lesen |
 Ausgänge
Ausgänge
Name | Typ | Beschreibung | OPC-UA-Zugriff |
|---|---|---|---|
State* |
| Siehe Operation Mode |
|
FwdCtrl | BOOL | Vorwärtsbewegung: 1: Aktiv 0: Inaktiv | Lesen |
RevCtrl | BOOL | Rückwärtsbewegung: 1: Aktiv 0: Inaktiv | Lesen |
Src* |
| Siehe Source Mode |
|
Rpm | REAL | Drehzahl-Sollwert an Antrieb | Lesen |
SafePosAct | BOOL | Sicherheitsposition aktiviert: 1: Sicherheitsposition ist aktiv. 0: Sicherheitsposition ist nicht aktiv. | Lesen |
Externe Variablen
Name | Typ | Beschreibung | OPC-UA-Zugriff |
|---|---|---|---|
State* |
| Siehe Operation Mode |
|
StopOp | BOOL |
(Relevant, wenn 1: Stopp ausführen. 0: Keinen Stopp ausführen. | Lesen/schreiben |
FwdOp | BOOL |
(Relevant, wenn 1: Vorwärtsbewegung ausführen. 0: Keine Vorwärtsbewegung ausführen. | Lesen/schreiben |
RevOp | BOOL |
(Relevant, wenn 1: Rückwärtsbewegung ausführen. 0: Keine Rückwärtsbewegung ausführen. | Lesen/schreiben |
Src* |
| Siehe Source Mode |
|
RpmMan | REAL |
| Lesen/schreiben |
RpmRbk | REAL | Unbearbeiteter Wert der | Lesen |
ResetOp | BOOL |
0→1: 1→0: Anfrage wurde verarbeitet. | Lesen/schreiben |
 Methoden
Methoden
Name | Beschreibung |
|---|---|
SetOffline SetOperator SetAutomatic | Siehe Operation Mode |
SetInternal SetManual | Siehe Source Mode |