Blindleistungsregler
Die Konfiguration der Blindleistungsregelung erfolgt über die Parameter der Gruppe ReactivePower (siehe ReactivePower). Die Regelung orientiert sich an den Anforderungen den VDE- sowie den EN-Normen und berücksichtigt das typische Verhalten dezentraler Erzeugungsanlagen im Netzbetrieb.
Initialisierung
Der Blindleistungsregler wird durch Setzen von bEnable = TRUE in den Control Eingangs-Prozessdaten aktiviert (siehe DataAreas).
Beim Aktivieren werden alle Integratoren und Filter auf die aktuellen Eingangswerte gesetzt bzw. zurückgesetzt, um einen stabilen Regelstart zu gewährleisten.
Begrenzung der Blindleistung
Die im Betrieb verfügbare Blindleistung der angeschlossenen Erzeugungsanlage wird über folgende Parameter angegeben:
ReactiveMaxUdExt: Maximale kapazitive Blindleistung (Unterer Bereich)ReactiveMaxOvExt: Maximale induktive Blindleistung (Oberer Bereich)
Die Werte sind mit Vorzeichen gemäß dem Erzeuger-Zählpfeilsystem zu interpretieren.
Optional kann eine wirklastabhängige Blindleistungskurve der Erzeugungsanlage aktiviert werden, um das Q(P)-Verhalten der Anlage zu berücksichtigen (siehe Kapitel Blindleistungsregelung mit Wirkleistungskennlinie Q(P)).
Signalfilterung
Folgende Parameter dienen zur Filterung der gemessenen Blindleistung:
ActualFilterTime(Default: 10 ms)ActualFilterType(Default: PT1)
Sowie folgende Parameter zur Filterung der gemessenen Spannung:
VoltageFilterTime(Default: 10 ms)VoltageFilterType(Default: PT1)
Reglerstruktur
Der Blindleistungsregler ist als klassischer PI-Regler aufgebaut:
ControlGain: ReglerverstärkungControlIntegration: Integrationszeitkonstante
Eine zusätzliche Filterung über folgende Parameter dient sowohl zur Glättung als auch zur Anstiegsbegrenzung des Sollwerts in Richtung des Reglers, damit die Dynamik der Steuerung dem gefordertem Verhalten eines Filters erster Ordnung entspricht.
ReactiveTargetFilterTime(Default: 2 s)ReactiveTargetFilterType(Default: PT1)
Zur zusätzlichen Glättung und Begrenzung der Sollwertanstiegs wird ein Tiefpass erster Ordnung (PT1) eingesetzt. Dadurch entspricht die eingestellte Filterzeit einem Zeitglied 1. Ordnung mit der Zeitkonstante τ.
ReactiveTargetFilterTime(Default: 2000 ms = 2 s = 1 τ)ReactiveTargetFilterType(Default: PT1)
Mit der im Default eingestellten Filterzeit von 2 Sekunden (1 τ) wird der Sollwert auf ca. 63 % des Endwerts angehoben. Dies entspricht der VDE-Anforderungen, ein Einschwingverhalten über 3 τ ≈ 6 Sekunden einzuhalten.
Prädiktive Reglung (Optional)
Bei bekannter Anlagencharakteristik kann die Streckenverzögerung modellbasiert berücksichtigt werden. Diese Parameter verbessern das Einschwingverhalten insbesondere bei Anlagen mit einer im Verhältnis zur Streckenverzögerung dominanten Totzeit.
- PredictDeadtime: Abbildung der Totzeit der Strecke
- PredictFilterTime: Abbildung der PT1-Verzögerung
Blockschaltbild
Die folgende Abbildung zeigt den prinzipiellen Aufbau des Blindleistungsreglers:
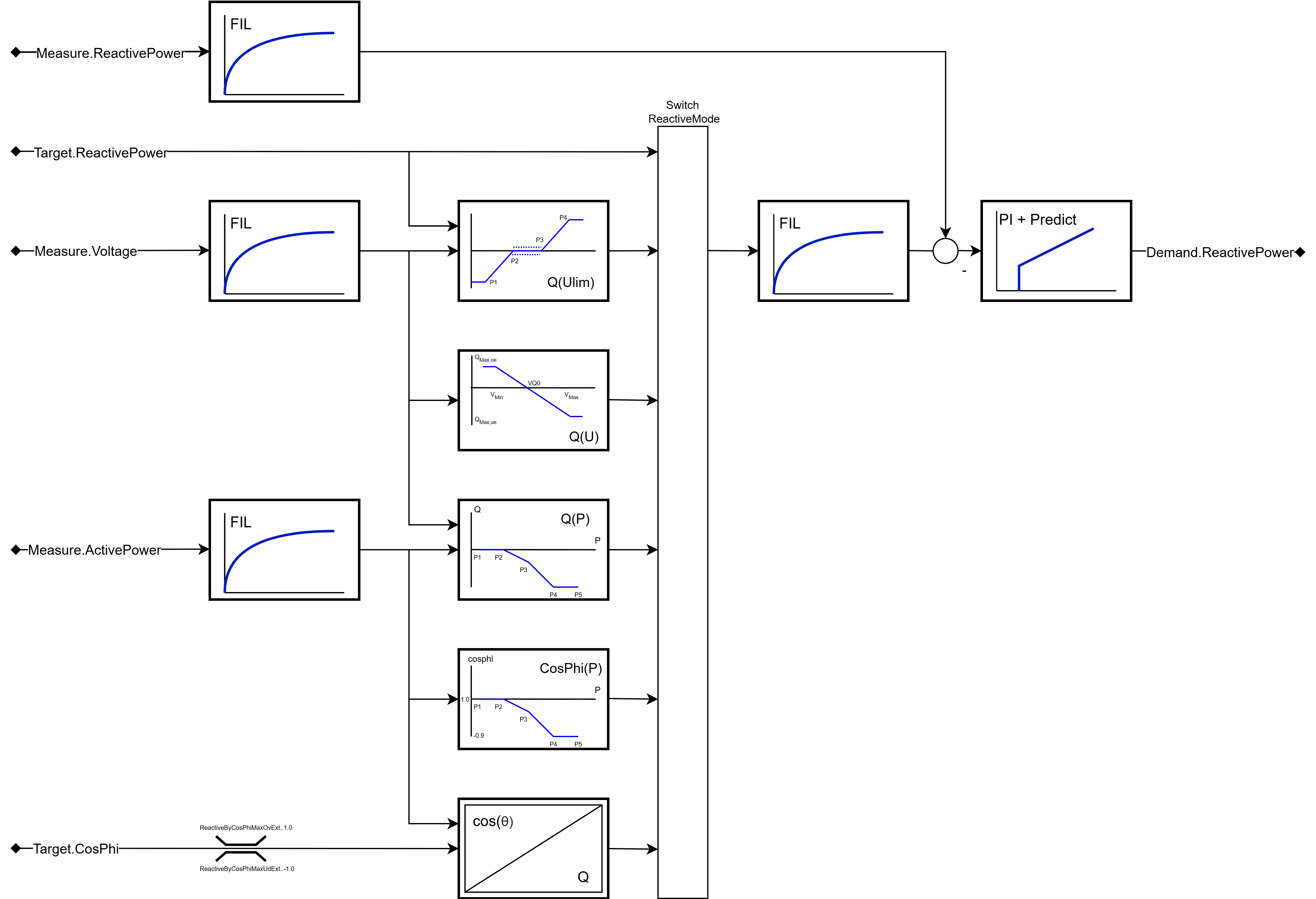
- Betriebsmodi des Blindleistungsreglers
- Umschaltung Betriebsmodi im Betrieb
- Blindleistungsregelung mit konstantem Sollwert
- Blindleistungsregelung mit Verschiebefaktor CosPhi
- Blindleistungsregelung mit Spannungskennlinie Q(U)
- Blindleistungsregelung mit Spannungsbegrenzungsfunktion Q(Ulim)
- Blindleistungsregelung mit Wirkleistungskennlinie Q(P)
- Blindleistungsregelung mit CosPhi(P)-Kennlinie
- Wirkleistungsabhängige Blindleistungsvermögen