F_VN_SobelFilter

Calculates the first, second, or mixed image derivatives using an extended Sobel filter.
Syntax
Definition:
FUNCTION F_VN_SobelFilter : HRESULT
VAR_INPUT
ipSrcImage : ITcVnImage;
ipDestImage : Reference To ITcVnImage;
eDestDepth : ETcVnElementType;
nXOrder : UDINT;
nYOrder : UDINT;
hrPrev : HRESULT;
END_VAR
 Inputs
Inputs
|
Name |
Type |
Description |
|---|---|---|
|
ipSrcImage |
Source image | |
|
ipDestImage |
Reference To ITcVnImage |
Destination image (An appropriate destination image will be created if required.) |
|
eDestDepth |
Destination image depth | |
|
nXOrder |
UDINT |
Order of the x-derivative (0, 1, 2) |
|
nYOrder |
UDINT |
Order of the y-derivative (0, 1, 2) |
|
hrPrev |
HRESULT indicating the result of previous operations (If SUCCEEDED(hrPrev) equals false, no operation is executed.) |
 Return value
Return valueWeiterführende Informationen
Die Funktion F_VN_SobelFilter wendet einen Sobel-Filter auf das Eingangsbild an. Der Sobel-Filter dient zur Kantendetektion. Kanten im Eingangsbild werden als helle Linien auf dunklem Hintergrund im Ergebnisbild hervorgehoben.
Algorithmus
Der erweiterte Sobel-Filter kann verwendet werden um Kanten zu detektieren, indem die n-te Ableitung der Übergänge benachbarter Pixelintensitäten approximiert wird. Da die Ableitung auch negative Werte hat, empfiehlt es sich einen vorzeichenbehafteten Elementtyp für das Ergebnisbild zu verwenden (z. B. TCVN_ET_INT).
Der Kernel des Filters wird durch die Parameter der Funktion bestimmt. Typischerweise wird die Funktion mit nXOrder = 1, nYOrder = 0, nKernelSize = 3 oder nXOrder = 0, nYOrder = 1, nKernelSize = 3 aufgerufen. Diese Parameter führen zu den Kerneln Gx und Gy.
Für diese Kernel kombiniert der Filter die Gaußsche Glättung mit der Berechnung der ersten Ableitung, so dass das Ergebnis recht rauschresistent ist. Gx betont vertikale Kanten, Gy betont horizontale Kanten.
Parameter
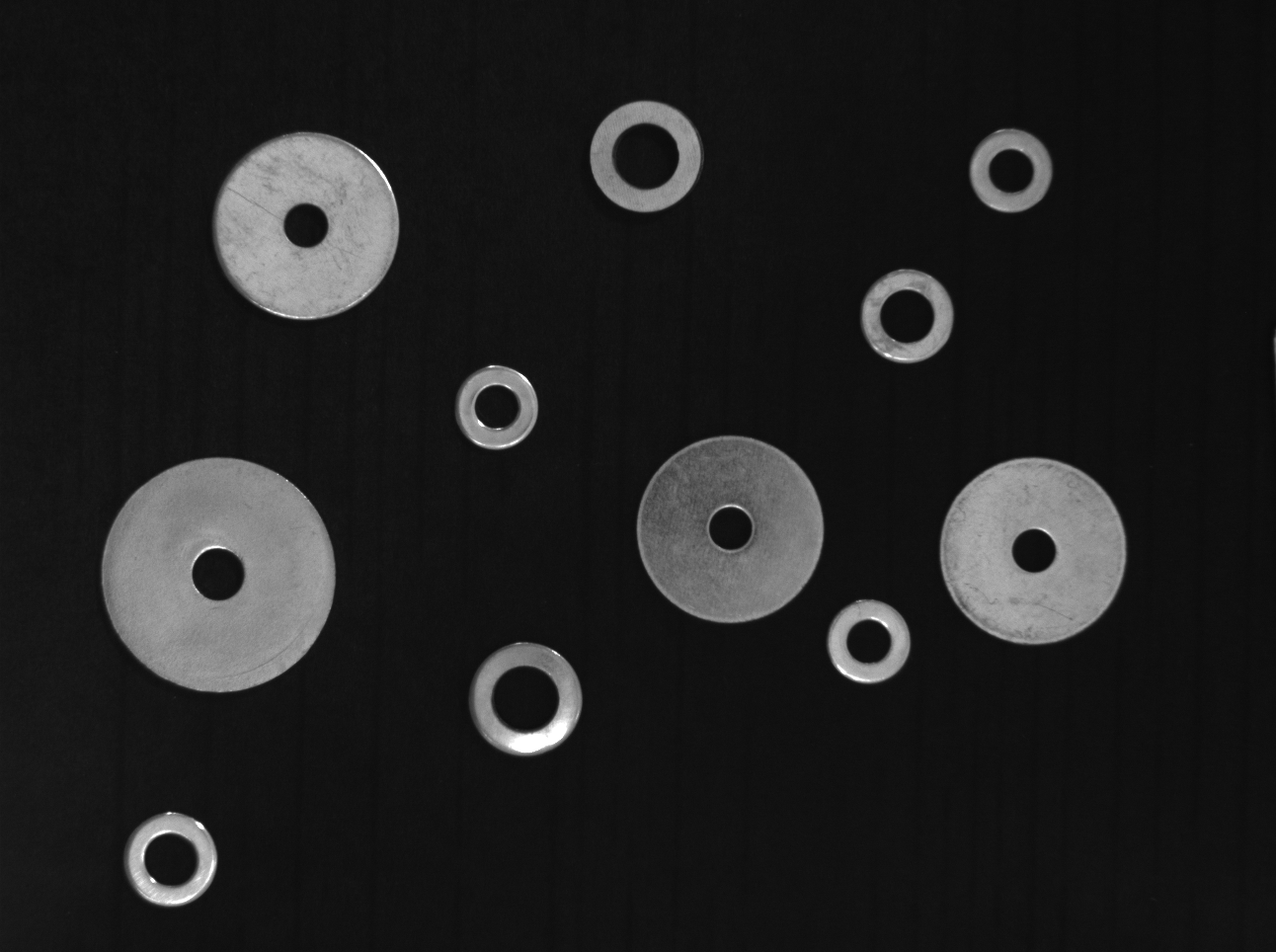
Originalbild
Das Originalbild ipSrcImage kann jedes verfügbare Format haben.
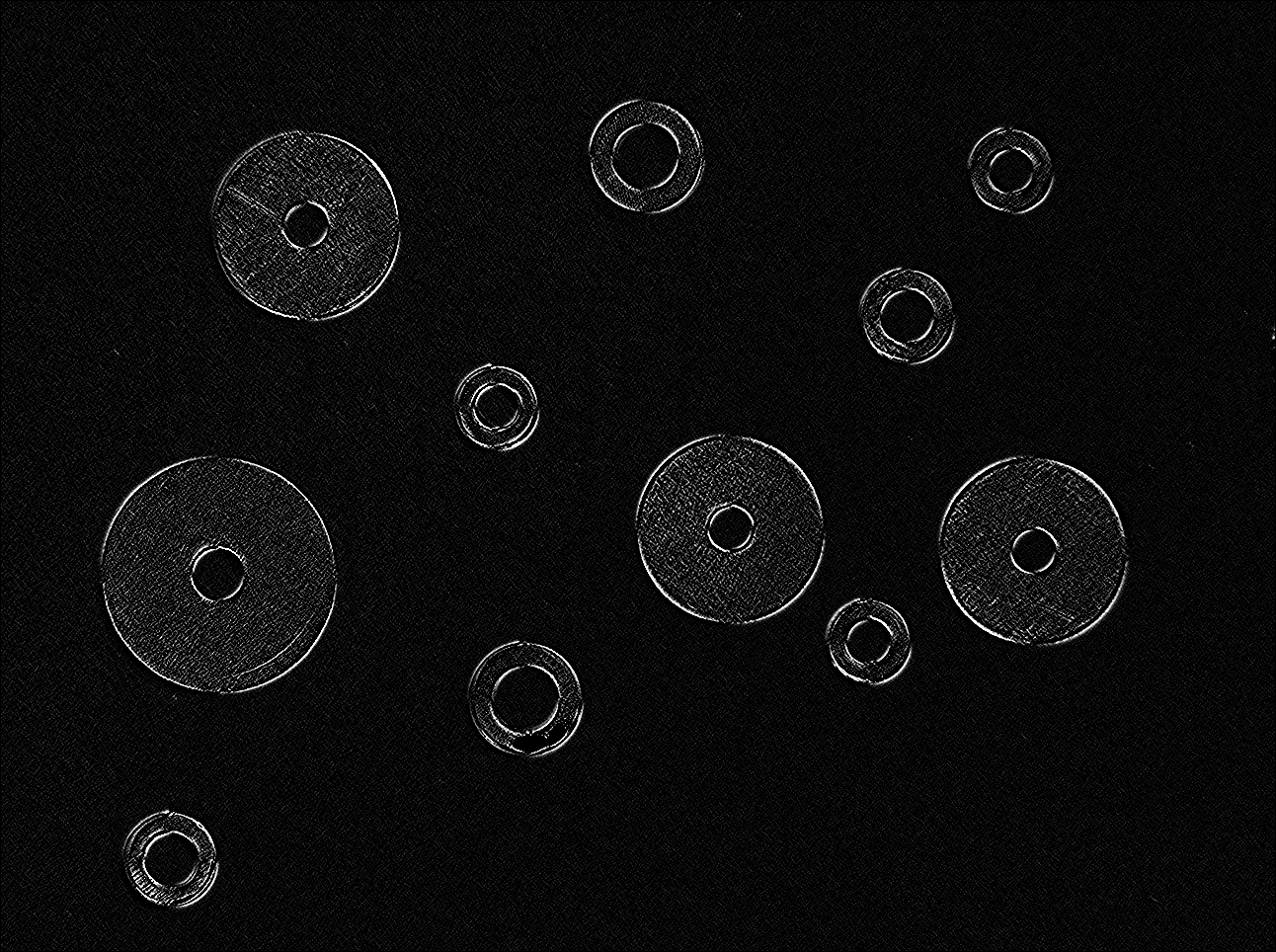
Ergebnisbild
Das Ergebnisbild ipDestImage liefert das Filter-Ergebnis zurück und besitzt das gleiche Format wie das Originalbild ipSrcImage.
Ergebnistiefe
Die Ergebnistiefe eDestDepth definiert, welchen Element-Typ das Ergebnisbild ipDestImage hat. Ein größerer Element-Typ kann mehr Informationen darstellen.
Ableitungsordnung
Die Ableitungsordnungen nXOrder und nYOrder definieren, die wievielte Ableitung in X- und Y-Richtung verwendet werden soll, um den Filter zu erstellen.
Expert-Parameter
Weitere Parameter finden Sie in der Expert-Variante F_VN_SobelFilterExp.
Anwendung
hr := F_VN_SobelFilter(
ipSrcImage := ipImageIn,
ipDestImage := ipImageRes,
eDestDepth := TCVN_ET_USINT,
nXOrder := 1,
nYOrder := 1,
hrPrev := hr,
);Originalbild | Ergebnisbild |
|
|
Beispiele
Required License
TC3 Vision Base
System Requirements
Development environment | Target platform | PLC libraries to include |
|---|---|---|
TwinCAT V3.1.4024.59 or later | PC or CX (x64) with min. PL50, e.g. Intel 4-core Atom CPU | Tc3_Vision |