F_VN_MeasureMinEdgeDistance

Measure the minimum distance within the specified search window between two edges, using an interpolation method. The midpoint between aStartPoint and aEndPoint must be located between the two edges.
Can use available TwinCAT Job Tasks for executing parallel code regions.
Can return partial results when canceled by Watchdog.
Syntax
Definition:
FUNCTION F_VN_MeasureMinEdgeDistance : HRESULT
VAR_INPUT
ipSrcImage : ITcVnImage;
END_VAR
VAR_IN_OUT
fMinDistance : REAL;
aStartPoint : TcVnPoint2_REAL;
aEndPoint : TcVnPoint2_REAL;
END_VAR
VAR_INPUT
eEdgeDirection : ETcVnEdgeDirection;
fMinStrength : REAL;
nSearchLines : UDINT;
hrPrev : HRESULT;
END_VAR
 Inputs
Inputs
|
Name |
Type |
Description |
|---|---|---|
|
ipSrcImage |
Source image (1 channel) | |
|
eEdgeDirection |
Specification of the edge direction from aStartPoint to aEndPoint to search for | |
|
fMinStrength |
REAL |
Specification of the minimum strength (intensity difference) of the edge to search for |
|
nSearchLines |
UDINT |
Width of the search window, i.e. the number of search lines (1, 3, 5, 7, ...), centered around the line specified by aStartPoint and aEndPoint |
|
hrPrev |
HRESULT indicating the result of previous operations (If SUCCEEDED(hrPrev) equals false, no operation is executed.) |
In/Outputs
|
Name |
Type |
Description |
|---|---|---|
|
fMinDistance |
REAL |
Returns the minimum distance between the detected edges |
|
aStartPoint |
Position from which to start the search process (in the direction of aEndPoint) | |
|
aEndPoint |
Position where the search process ends |
 Return value
Return valueWeiterführende Informationen
Die Funktion F_VN_MeasureMinEdgeDistance lokalisiert zwei lineare Kanten und misst den minimalen Abstand zwischen ihnen.
Parameter
Eingangsbild
Das Eingangsbild ipSrcImage muss ein 1-kanaliges Grauwertbild sein.
Minimaler Abstand (Rückgabewert)
Der Parameter fMinDistance gibt den minimalen Abstand der beiden lokalisierten Kanten zurück.
Das Suchfenster
Zunächst einmal muss ein Suchfenster definiert werden, um festzulegen wo und in welcher Richtung nach einer Kante gesucht werden soll. Dies geschieht mit den Parametern aStartPoint, aEndPoint und nSearchLines. Das Suchfenster ergibt sich aus der Suchlinie von aStartPoint nach aEndPoint und parallel dazu (nSearchLines - 1) / 2 Suchlinien in jede Richtung, mit jeweils 1 Pixel Abstand. Somit definiert nSearchLines die Anzahl der Suchlinien und muss immer einen ungeraden Wert haben.
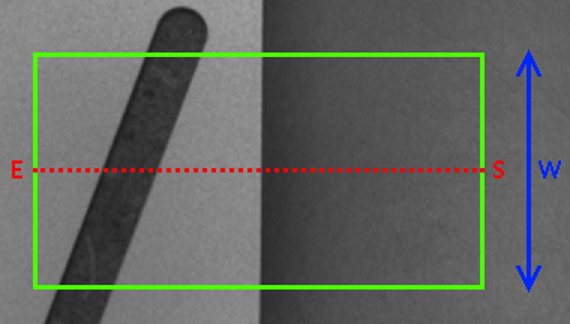 Abb.15: S: StartPoint, E: EndPoint, W: WindowWidth
Abb.15: S: StartPoint, E: EndPoint, W: WindowWidthParameter zur Kantenlokalisierung
Die restlichen Parameter sind ausführlich im Kapitel Kantenlokalisierung erklärt.
Expert-Parameter
Die Expert-Variante F_VN_MeasureMinEdgeDistanceExp enthält zusätzliche Parameter.
Anwendung
Die Vermessung einer Kantendistanz sieht z. B. so aus:
hr := F_VN_MeasureMinEdgeDistance(
ipSrcImage := ipImageIn,
fMinDistance := fMinDistance,
aStartPoint := aStartPoint,
aEndPoint := aEndPoint,
eEdgeDirection := TCVN_ED_LIGHT_TO_DARK,
fMinStrength := fMinStrength,
nSearchLines := nSearchLines,
hrPrev := hr);Verwandte Funktionen
- ClosestPointsBF zur Berechnung der nächstgelegenen Punkte zweier Punktewolken
- MeasureAngleBetweenEdges zur Vermessung des Winkels zwischen zwei Kanten
- MeasureEdgeDistance zur Vermessung des durchschnittlichen Abstands zweier Kanten
- MeasureMinEdgeDistance zur Vermessung des minimalen Abstands zweier Kanten
Required License
TC3 Vision Metrology 2D
System Requirements
Development environment | Target platform | PLC libraries to include |
|---|---|---|
TwinCAT V3.1.4024.59 or later | PC or CX (x64) with min. PL50, e.g. Intel 4-core Atom CPU | Tc3_Vision |