PLC mittels Funktionsbausteinen verfahren
Achse bestromen
- Ein FluidPower Achsobjekt wurde angelegt und der Positionsregler optimiert,
siehe Regelparameter für Positionsregelung einstellen - Das FluidPower Achsobjekt wurde mit der PLC verknüpft,
siehe Achsobjekte mit PLC verknüpfen
- 1. Doppelklick auf MAIN und anlegen einer Instanz von Tc3_Mc3Ptp.MC_Power,
siehe MC_Power - 2. Implementierung eines zyklischen Aufrufs der angelegten Instanz
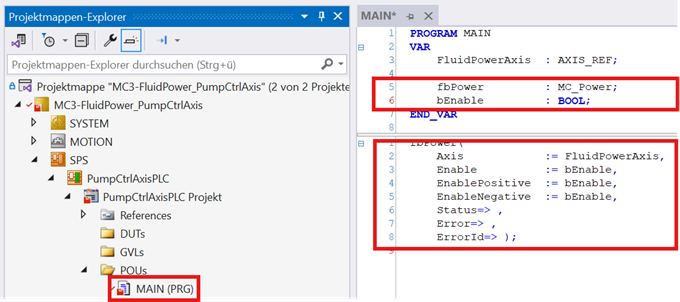
VAR
FluidPowerAxis : AXIS_REF;
fbPower : MC_Power;
bEnable : BOOL;
END_VARfbPower(
Axis := FluidPowerAxis,
Enable := bEnable,
EnablePositive := bEnable,
EnableNegative := bEnable,
Status=> ,
Error=> ,
ErrorId=> );Absolute Positionierung
- 3. Anlegen einer Instanz von Tc3_Mc3Ptp.MC_MoveAbsolute,
siehe MC_MoveAbsolute - 4. Implementierung eines zyklischen Aufrufs der angelegten Instanz
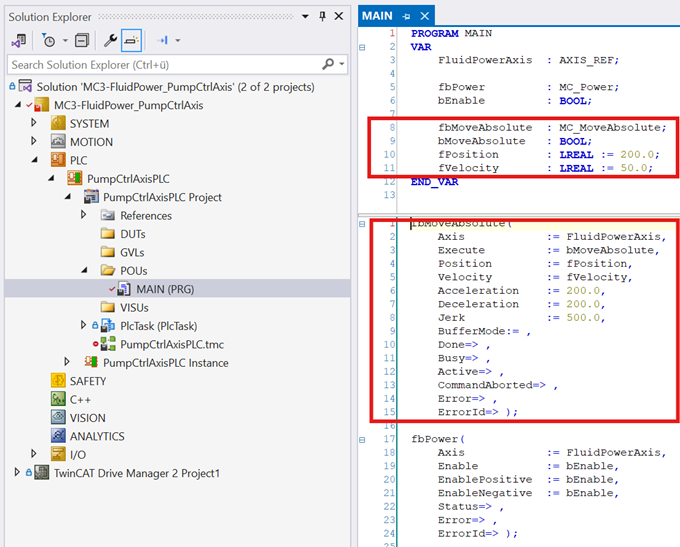
→ Die Achse kann nun mittels PLC bestromt und in die Endlage bewegt werden.
fbMoveAbsolute : MC_MoveAbsolute;
bMoveAbsolute : BOOL;
fPosition : LREAL := 200.0;
fVelocity : LREAL := 50.0;fbMoveAbsolute(
Axis := FluidPowerAxis,
Execute := bMoveAbsolute,
Position := fPosition,
Velocity := fVelocity,
Acceleration := 200.0,
Deceleration := 200.0,
Jerk := 500.0,
BufferMode:= ,
Done=> ,
Busy=> ,
Active=> ,
CommandAborted=> ,
Error=> ,
ErrorId=> );Druck-/Kraftregelung
- 5. Anlegen einer Instanz von Tc3_Mc3Ptp.MC_LoadControl,
siehe MC_LoadControl - 6. Implementierung eines zyklischen Aufrufs der angelegten Instanz
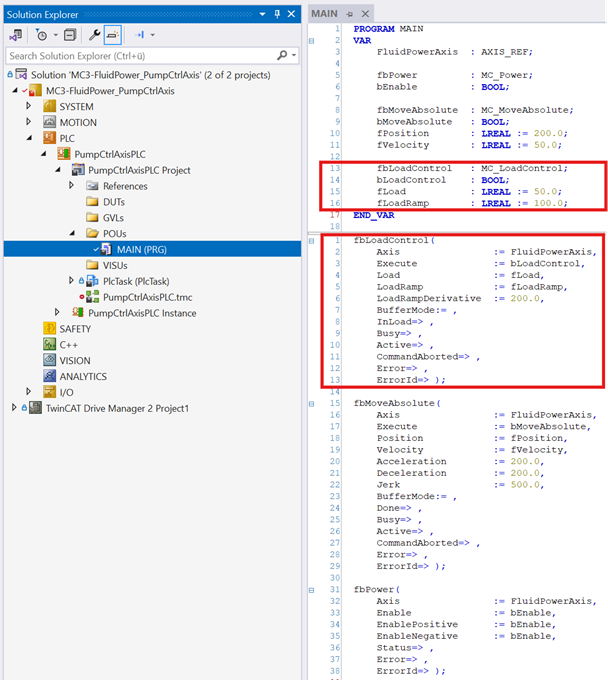
→ Die Druck-/Kraftregelung der Achse kann nun mittels PLC angestoßen werden.
fbLoadControl : MC_LoadControl;
bLoadControl : BOOL;
fLoad : LREAL := 50.0;
fLoadRamp : LREAL := 100.0;fbLoadControl(
Axis := FluidPowerAxis,
Execute := bLoadControl,
Load := fLoad,
LoadRamp := fLoadRamp,
LoadRampDerivative := 200.0,
BufferMode:= ,
InLoad=> ,
Busy=> ,
Active=> ,
CommandAborted=> ,
Error=> ,
ErrorId=> );Im nächsten Schritt erfolgt die Optimierung des Druckreglers,
siehe Druckregler einstellen