Regelparameter für Positionsregelung einstellen
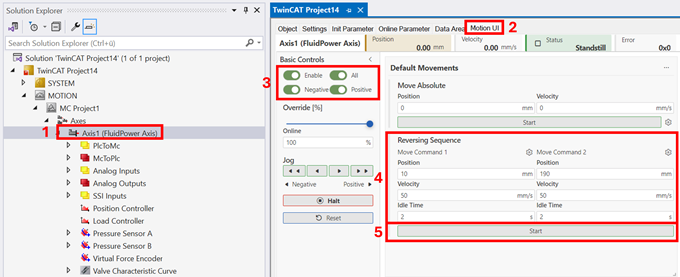
Testbewegung starten
- Die MC3-FluidPower-Achse wurde im Handbetrieb verfahren,
siehe Achse im Handbetrieb mittels Motion UI verfahren.
- 1. Doppelklick auf das Axis Objekt
- 2. Öffnen der Registerkarte Motion UI
- 3. Bestromen der Achse durch Klick auf Enable All
- 4. Setzten Sie in der Karte Default Movements zu Ihrem Bewegungsprofil passende Parameter des Reversierbetriebs.
- 5. Start der Bewegung
Regler einstellen
- 6. Doppelklick auf das Position Controller Objekt
- 7. Öffnen der Registerkarte Init Parameter
- 8. Optimierung der Regelparameter (siehe auch Init Parameter)
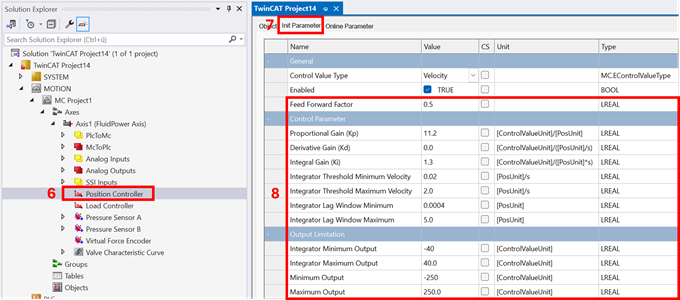
- Ggf. zuvor gesetzte Limitierung des Stellsignals Minimum / Maximum Output auf, für das Hydrauliksystem zulässige Werte, erhöhen.
- Setzen Integral Gain und Derivative Gain = 0.0
- Erhöhen Proportional Gain bis das Ausgangssignal beginnt zu oszillieren
- Geringfügige Reduzierung von Proportional Gain
- Ggf. Anpassung Feed Forward Factor zur Annäherung der Ist- and die Sollgeschwindigkeit
- Setzen Integral Gain zur Reduzierung des Restfehlers in der Zielposition
- Begrenzen der Geschwindigkeitsfenster Integrator Threshold Minimum / Maximum Velocity des I-Anteils zur Vermeidung einer Aufintegration während der Bewegung und einem daraus resultierenden Überschwingen.
- Begrenzung der Schleppfehlerfenster Integrator Lag Window Minimum / Maximum des I-Anteils zur Vermeidung verbleibender Oszillation in der Zielposition.
Empfehlung für Integrator Lag Window Minimum ist die 4-fache Auflösung des Wegmesssystems.
Das Integrator Lag Window Maximum steht in Relation zum verbleibenden Schleppfehler bei reiner P-Regelung.
Im nächsten Schritt folgt die Anbindung der FluidPower-Achse an die PLC,
siehe Achsobjekte mit PLC verknüpfen