CA-Gruppe (TF5410 TwinCAT 3 Collision Avoidance)
Die CA-Gruppe verbindet Achsen, um die PTP-Funktionalitäten um Collision Avoidance zu ergänzen.
Dynamik-Werte
- Velocity Vel: Geschwindigkeit,
- Acceleration Acc: Positive Beschleunigung,
- Deceleration Dec: Bremsbeschleunigung, negative Beschleunigung,
- Jerk: Ruck.
Soll-Werte
|
|
CA-Gruppe
|
|
Achse
|
|
Gap
Nachbarschaft
|
|
Zählrichtung
|
|
Nachfolger;
|
|
Größe
|
|
Untere
|
|
Gap Control
|
|
Gap Control
|
|
Öffnen des Dialogs „Parameter (Init)“
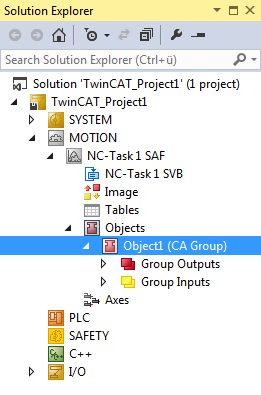
Wurzelknoten einer CA-Gruppe.
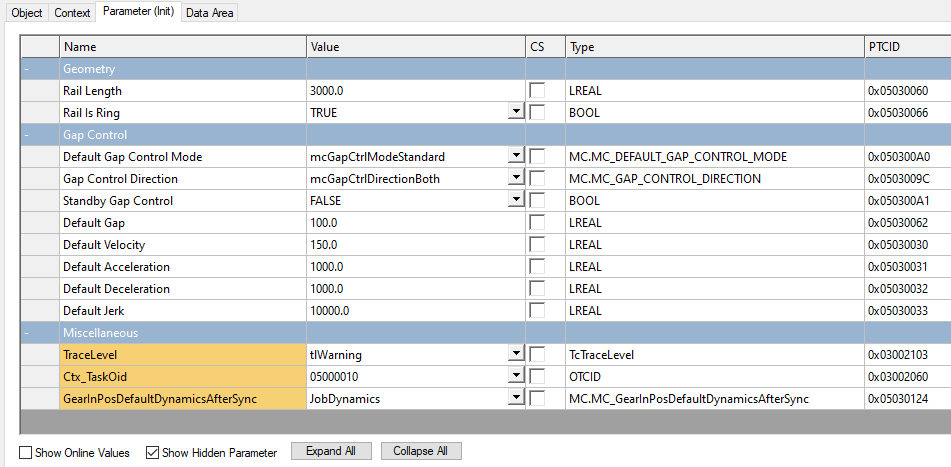
Parameter für eine CA-Gruppe.
Die Tabellenspalte „Value“ zeigt den jeweils voreingestellten Parameter-Wert.Die Tabellenspalte „Comment“ enthält kurze Parameter-Beschreibungen.
Parameter | Beschreibung |
|---|---|
Geometry |
|
Rail Length | Länge der Schiene, auf der die Achsen (Mover) montiert sind. |
Rail Is Ring | Gibt an, ob die Schienen einen geschlossenen Kreis bilden. In dem Fall (TRUE) ist die Collision Avoidance zwischen dem ersten Mover in der Reihe und dem letzten Mover aktiviert. |
Gap Control |
|
Default Gap Control Mode | Es stehen verschiedene Modi für die Abstandssteuerung zur Verfügung (siehe "MC_DEFAULT_GAP_CONTROL_MODE"). |
Gap Control Direction | Für die Regelungs-Richtung des Gaps sind verschiedene Einstellungen verfügbar (siehe Abschnitt „MC_GAP_CONTROL_DIRECTION“). |
Active Gap Establishing | Ab der Version 3.3 wird von der ‚Collision Avoidance‘ keine aktive Bewegung ausgelöst und nur noch verzögernd in das Bewegungsprofil eingegriffen. Das Verhalten der Version 3.2, in welcher die ‚Collision Avoidance‘ eine aktive Bewegungen zur Herstellung des parametrierten Abstands (Gaps) ausgelöst hat, kann über das setzten des Parameters ‚Active Gap Establishing‘ in der CA-Gruppe auf ‚True‘ wiederhergestellt werden. Dieser ist ab der Version 3.3 in der Standardeinstellung auf ‚False‘ gesetzt. |
Standby Gap Control | Wenn TRUE, ist die Collision Avoidance immer aktiv, auch wenn kein Bewegungskommando an die Achse ausgegeben wurde. |
Default Gap | Dieser Abstand wird für die Standby Gap Control verwendet und wenn bei einem CA-Bewegungskommando kein Abstand festgelegt wurde. |
Default Velocity | Diese Geschwindigkeit wird für die Standby Gap Control verwendet, das heißt, wenn kein Bewegungskommando aktiv ist (z. B. direkt nach MC_GroupEnable). Sie wird nicht als Standardgeschwindigkeit für ein Bewegungskommando verwendet, wenn keine Geschwindigkeit festgelegt wurde. |
Default Acceleration | Diese Beschleunigung wird für die Standby Gap Control verwendet, das heißt, wenn kein Bewegungskommando aktiv ist (z. B. direkt nach MC_GroupEnable). Sie wird nicht als Standardbeschleunigung für ein Bewegungskommando verwendet, wenn keine Beschleunigung festgelegt wurde. |
Default Deceleration | Diese Verzögerung wird für die Standby Gap Control verwendet, das heißt wenn kein Bewegungskommando aktiv ist (z.B. direkt nach MC_GroupEnable). Sie wird nicht als Standardverzögerung für ein Bewegungskommando verwendet, wenn keine Verzögerung festgelegt wurde. |
Default Jerk | Dieser Ruck wird für die Standby Gap Control verwendet, das heißt wenn kein Bewegungskommando aktiv ist (z.B. direkt nach MC_GroupEnable). Er wird nicht als Standardruck für ein Bewegungskommando verwendet, wenn kein Ruck festgelegt wurde. |
GearInPosDefaultDynamicsAfterSync (hidden!) | Weist die in MC_GearInPosCA AfterSyncDynamics genutzten Default-Dynamiken aus. Im Default-Zustand ist der Wert „JobDynamics“ gesetzt. Der Parameter ist nicht für ältere Projekte verfügbar (erzeugt mit Versionen < 3.1.10), wird aber intern auf 'MaximumSlaveDynamics' gesetzt. |
 | Nach dem erneuten Laden der TMC-Datei wird "JobDynamics" als Default-Wert gesetzt (siehe MC_GearInPosDefaultDynamicsAfterSync). |
- Wenn bereits eine NC-Konfiguration hinzugefügt worden ist, dann enthält der MOTION-Teilbaum einen SAF-Task-Teilbaum.
- Der SAF-Task-Teilbaum enthält den Teilbaum „Objects“.
- Der Teilbaum „Objects“ kann eine CA-Gruppe enthalten.
- 1. Doppelklicken Sie auf den Wurzelknoten der CA-Gruppe, deren Parameter Sie anschauen oder einstellen möchten.
- 2. Wählen Sie den Karteireiter „Parameter (Init)“ an.
- Der Dialog „Parameter (Init)“ ist geöffnet.
- Er enthält eine Tabelle mit Parametern für die angewählte CA-Gruppe.
- Diese Parameter sind in die Gruppen „Geometry“, „Gap Control“ und ggf. „Misc.“ eingeteilt.