MC_DEFAULT_GAP_CONTROL_MODE
Der Gap Control Mode legt das Verhalten der Collision Avoidance fest. Gegenwärtig stehen die folgenden Modi zur Verfügung:
TYPE MC_DEFAULT_GAP_CONTROL_MODE :
(
mcGapCtrlModeStandard := 16#1,
mcGapCtrlModeFast := 16#2
)
END_TYPEBeispiele
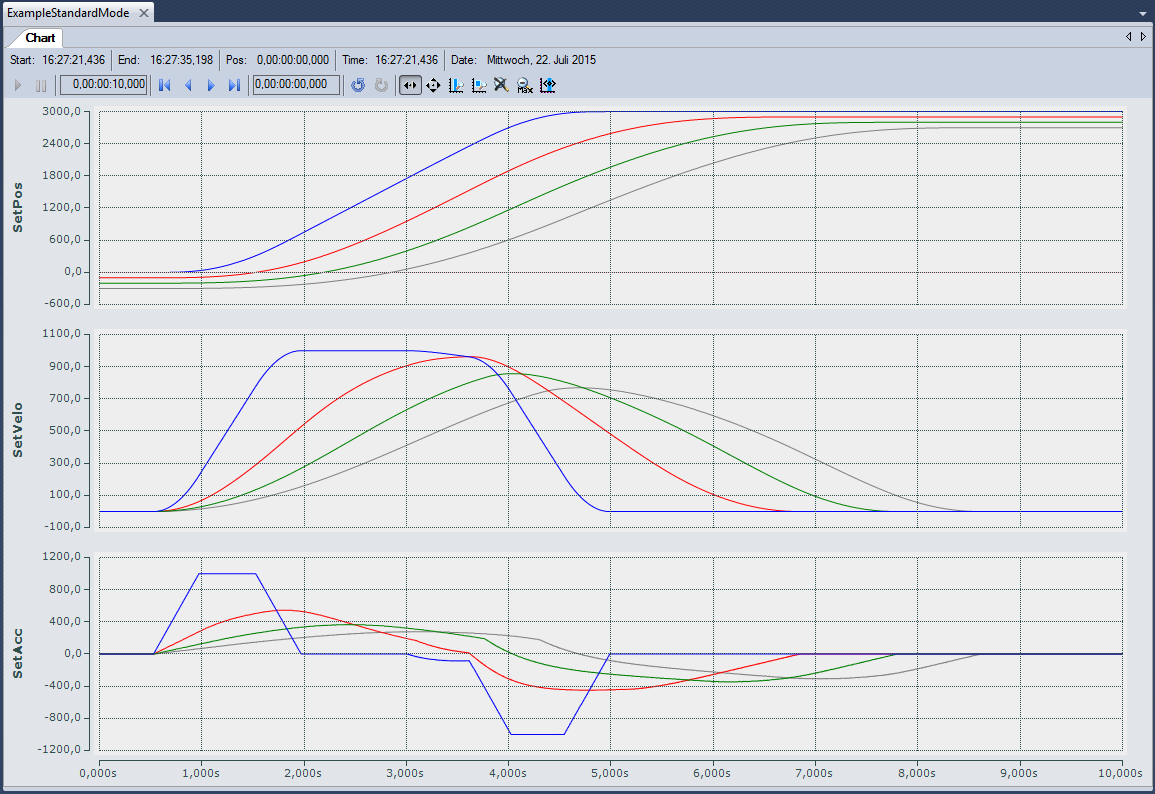
Beispiel mcGapCtrlModeStandard:
- Konfiguration mit vier Achsen (Mover) in der CA-Gruppe. Die Rail Length beträgt 3000 mm und die Schiene ist geschlossen (z. B. XTS-System).
- Die erste Achse in der Reihe (blau) steht an Position 0,0 mm, die übrigen drei Achsen sind dahinter mit einem jeweiligen Abstand von 100 mm aufgereiht.
- Der Gap Control Mode wird auf mcGapCtrlModeStandard gesetzt.
- 1. MC_MoveAbsoluteCA in die Position 3000 mm wird an alle Achsen ausgegeben, der Abstand beträgt 100 mm. Alle Achsen haben dieselbe Dynamik (Geschwindigkeit, Beschleunigung, Verzögerung, Ruck).
- Die Achsen fächern während der Beschleunigungsphase charakteristisch aus, so dass eine Kollision während des Bewegungskommandos verhindert wird. Die erste Achse (blau) erreicht die Zielposition, die übrigen Achsen reihen sich nacheinander mit dem konfigurierten Default Gap auf.
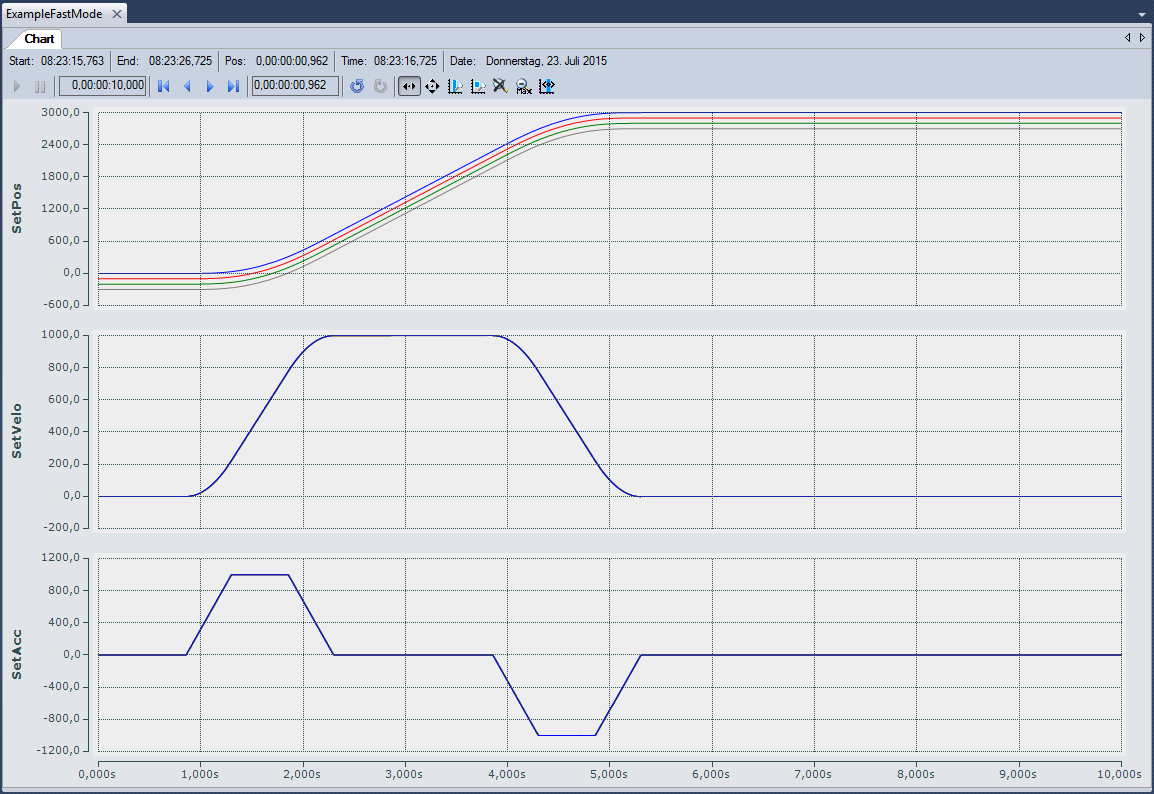
Beispiel mcGapCtrlModeFast:
- Konfiguration mit vier Achsen (Mover) in der CA-Gruppe. Die Rail Length beträgt 3000 mm und die Schiene ist geschlossen (z. B. XTS-System).
- Die erste Achse in der Reihe (blau) steht an Position 0,0 mm. Die übrigen drei Achsen sind dahinter mit einem jeweiligen Abstand von 100 mm aufgereiht.
- Der Gap Control Mode wird auf mcGapCtrlModeFast gesetzt
- 1. MC_MoveAbsoluteCA in die Position 3000 mm wird an alle Achsen ausgegeben, der Abstand beträgt 100 mm. Alle Achsen haben dieselbe Dynamik (Geschwindigkeit, Beschleunigung, Verzögerung, Ruck).
- Alle Achsen bewegen sich gleichzeitig und mit voller Dynamik. Der Abstand zwischen den Achsen wird nahezu konstant gehalten. Die erste Achse erreicht die Zielposition, die Übrigen reihen sich dahinter auf.