Modus „INDIRECT“
Der Modus „INDIRECT“ (P-AXIS-00753) kann verwendet werden, falls im Messsystem die zu dämpfende Schwingung (P-AXIS-00751) nicht enthalten ist. Dazu wird die mechanische Schwingung durch ein digitales Filter simuliert:
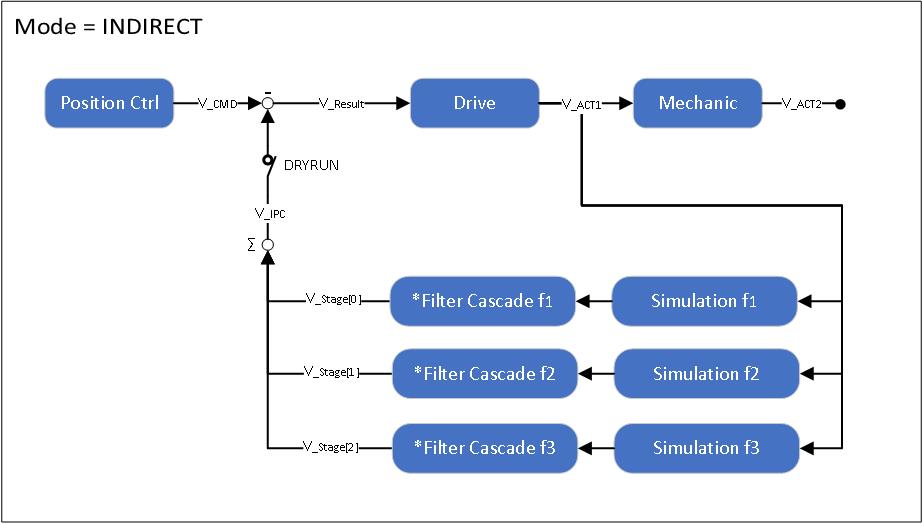
Die Filterkaskade ist identisch wie beim Modus „DIRECT“.
Durch die Angabe einer Dämpfung (P-AXIS-00850) kann für jede der zu dämpfenden Frequenzen separat eine Simulation der mechanischen Schwingung durchgeführt werden. Das Ergebnis der Simulation wird wie das Ergebnis aus der Messung mit direktem Messsystem im Modus „DIRECT“ behandelt.
Das simulierte Frequenzspektrum wird durch eine geeignete Bandpassfilterung auf die jeweils relevante Frequenz reduziert. Optional kann über die Parametrierung eines Allpass-Filters die Phasenlage der gefilterten Geschwindigkeit angepasst werden.
Die Ergebnisse der einzelnen Filterpfade werden anschließend addiert.
Nach der Skalierung der resultierenden Geschwindigkeit wird diese als zusätzlicher additiver Geschwindigkeitsanteil (vIPC) auf die Stellgröße der Lageregelung (vCmd) aufgeschaltet. Dies führt zu einer aktiven Gegenbewegung des Motors zur jeweiligen Schwingung
Vorteil Modus „INDIRECT“
Im Vergleich zu dem Modus “DIRECT”, bietet der Modus “INDIRECT” den Vorteil, auch schwache Schwingungen, die nicht in den Istwerten des Motors oder des direkten Messsystems zu sehen sind, in der Simulation stark anregen zu können. So können auch Schwingungen, die nicht für den Modus „DIRECT“ geeignet sind, durch die Funktion “Improved Position Control” gedämpft werden.
Hinweis | |
Zu hohe Skalierung der additiven Geschwindigkeit kann zu einem Aufschwingen des Antriebs führen. Folge: Der Regelkreis wird instabil. |
Hinweis | |
Bei hohen Frequenzen kann es durch die Totzeit der Simulation zu einer Phasenverschiebung der ausgegebenen additiven Geschwindigkeit kommen. Folge: Schwingungen können verstärkt anstatt gedämpft werden. |
Hinweis | |
Bei niedrigen Dämpfungen kann es zu einer Ausgabe von hohen additiven Geschwindigkeiten kommen. Folge: Aufschwingen des Antriebs ist möglich. |