Axes | Axis 1 | Ctrl
Controller
Regler (Controller) sollen auf Basis von Sollgeschwindigkeiten oder weiteren Sollgrößen (z. B. Beschleunigung) und auf Basis von Sollgrößendifferenzen als Schleppfehler arbeiten. Der Regler arbeitet so, dass der Schleppabstand möglichst gering bleibt und die Achse kein Überschwingen in Position und Geschwindigkeit zeigt.
Es gibt eine Vielzahl von unterstützten Reglervarianten: Servo-Lageregler sowie Spezialregler für spezielle Achstypen.
Reglerarten
- Lageregler: Regeln die Istposition so, dass sie der Sollposition so exakt wie möglich folgt. Lageregler
P, Schleppabstands-Proportionalregler, Lageregler mit zweiP-Konstanten, Schleppabstands-Proportionalregler mit verschiedenen Konstanten für Stillstand und Bewegung, Lage-PID-T1-Regler mit proportionaler Beschleunigungsvorsteuerung. - Regler für Achsen: Servoachsen, Schrittmotoren, Schleichachsen, Eilachsen.
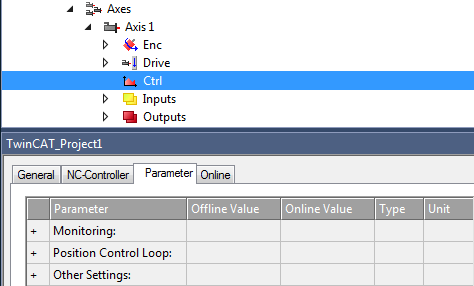
Unter „MOTION | NC-Task 1 SAF | Axes | Axis 1 | Ctrl“ zeigt die Registerkarte Parameter die Parametergruppen an
- Monitoring,
- Position Control Loop,
- Other Settings.
Des Weiteren können die Parametergruppen
- Velocity Control Loop,
- Observer
angezeigt werden.
Reglerarten und ihre Parameter
Die folgende Tabelle enthält die verfügbaren Reglerarten und zeigt, mit welchen Parametern sie jeweils konfiguriert („x“) oder nicht konfiguriert („-“) werden können.
