Installation
Systemvoraussetzung
Im Folgenden wird zwischen dem Engineering-PC und dem Laufzeit-PC unterschieden. Dazu wird folgende Definition getroffen: Auf dem Engineering-PC werden MATLAB®-Funktionen in TwinCAT-Objekte durch Einsatz des Target for MATLAB® konvertiert. Ebenso kann, muss aber nicht, auf diesem PC eine TwinCAT-Solution erstellt werden, welche die erstellten Objekte verwendet. Die erstelle TwinCAT-Solution wird dann vom Engineering-PC auf einen Laufzeit-PC in die TwinCAT-Laufzeitumgebung zur Ausführung des Projekts geladen.
Auf dem Engineering-PC
- MATLAB R2019a oder höher
- MATLAB® und MATLAB® Coder™ Toolbox
- Visual Studio 2017 oder höher (Professional, Ultimate oder äquivalente Edition)
- Bei der Installation muss manuell die Option Desktop development with C++ ausgewählt werden. Die Option kann auch nachträglich installiert werden.
- TwinCAT 3.1.4024.7 oder höher
- Installieren Sie TwinCAT 3 XAE oder Full Setup erst, nachdem Visual Studio mit Desktop development with C++ installiert wurde.
- TwinCAT Tools for MATLAB® and Simulink® Setup
Auf dem Laufzeit-PC
- Unterstützte Betriebssysteme
- Windows 11, Windows 10, Windows Server (32bit und 64bit)
- TwinCAT/BSD
- TwinCAT XAR Version 3.1.4024.7 oder höher
 | Gebaute Objekte können einfach weitergegeben werden Auf einem Engineering PC (oder Build Server) gebaute TwinCAT-Objekte können einfach an weitere Personen weitergereicht werden. Diese benötigen lediglich die TwinCAT-XAE-Entwicklungsumgebung, um die erstellten Objekte (TcCOM- oder PLC-Funktionsbausteine) in einer TwinCAT Solution zu nutzen. |
Installation (TwinCAT 3.1 Build 4026)
Der Workload TE1401 | TwinCAT 3 Target for MATLAB® installiert alle notwendigen Abhängigkeiten, die zum Erstellen von TwinCAT-Objekten notwendig sind.
- Installieren Sie eine der unterstützten Visual Studio-Versionen, falls nicht bereits vorhanden. Beachten Sie die Installation der Option Desktop development with C++.
- Installieren Sie den TwinCAT Package Manager.
- Installieren Sie über den TwinCAT Package Manager folgenden Workload:
Command line: tcpkg install TE1401.TargetForMATLAB.XAE
- Führen Sie die Integration in das Visual Studio aus, welches Sie mit der Option Desktop development with C++ installiert haben.
- Starten Sie MATLAB® als Administrator und führen Sie
C:\Program Files (x86)\Beckhoff\TwinCAT\Functions\TE14xx-ToolsForMatlabAndSimulink\SetupTE14xx.p in MATLAB® aus.
Möchten Sie ein TwinCAT Projekt erstellen und dort bereits gebaute TwinCAT-Objekte verwenden, installieren Sie folgende Workloads:
- TwinCAT Standard
tcpkg install TwinCAT.Standard.XAE - TwinCAT Block Diagram Classic
tcpkg install TwinCAT.XAE.BlockDiagramClassic - In einigen Fällen benötigen Sie auch folgende Pakete:
tcpkg install TwinCAT.XAE.TMX.MatSimUtilities
Installation (TwinCAT 3.1 Build 4024)
- Installieren Sie eine der unterstützten Visual Studio-Versionen, falls nicht bereits vorhanden. Beachten Sie die Installation der Option Desktop development with C++.
- 1. Starten Sie das TwinCAT 3 XAE oder Full Setup, falls nicht bereits vorhanden.
Sollte eine Visual Studio- sowie TwinCAT-Installation bereits vorhanden sein, die Visual Studio Version jedoch nicht den oben genannten Anforderungen entsprechen (z. B. TwinCAT XAE Shell oder Visual Studio ohne C++-Option), müssen Sie zunächst eine geeignete Visual Studio-Version installieren (ggf. die C++-Option nachinstallieren). Danach müssen Sie das TwinCAT 3-Setup ausführen, um TwinCAT 3 in die neue (oder veränderte) Visual Studio-Version zu integrieren. - 2. Falls noch keine MATLAB®-Installation auf Ihrem System vorhanden ist, installieren Sie diese. Die Reihenfolge, wann MATLAB® installiert worden ist, ist unerheblich.
- 3. Starten Sie TwinCAT Tools for MATLAB® and Simulink® Setup zur Installation des TE1401 TwinCAT Target for MATLAB®.
- Die Installation des TwinCAT Target for MATLAB® erfolgt innerhalb der TwinCAT-Ordnerstruktur, d. h. sie ist losgelöst von der MATLAB®-Installation.
- 4. Starten Sie MATLAB® als Administrator und führen Sie
%TwinCAT3Dir%.. \Functions\TE14xx-ToolsForMatlabAndSimulink\SetupTE14xx.p in MATLAB® aus.
- Es öffnet sich ein Fenster zur Einrichtung. Siehe dazu den folgenden Abschnitt.
Einrichtung der Software
Ausführung SetupTE14xx.p
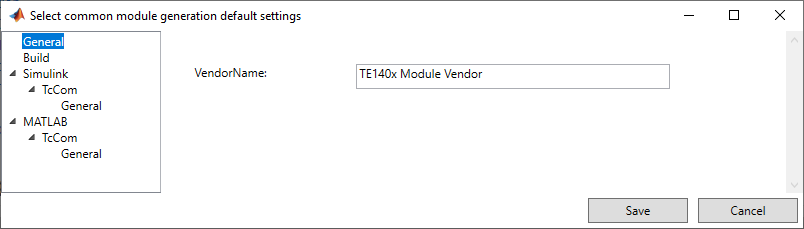
Nach Ausführung des p-Files öffnet sich ein Dialog, in dem Sie generelle Default-Einstellungen speichern können, die dann für das System gelten. Sie können die Einstellungen direkt setzen oder zu einem späteren Zeitpunkt einstellen/verändern.
Möchten Sie das p-File ohne diesen Dialog ausführen, können Sie folgenden Befehl nutzen: SetupTE140x('Silent', true);
Einstellungsmöglichkeiten im Dialog sind:
VendorName, GroupName (MATLAB®) und GroupName (Simulink®)
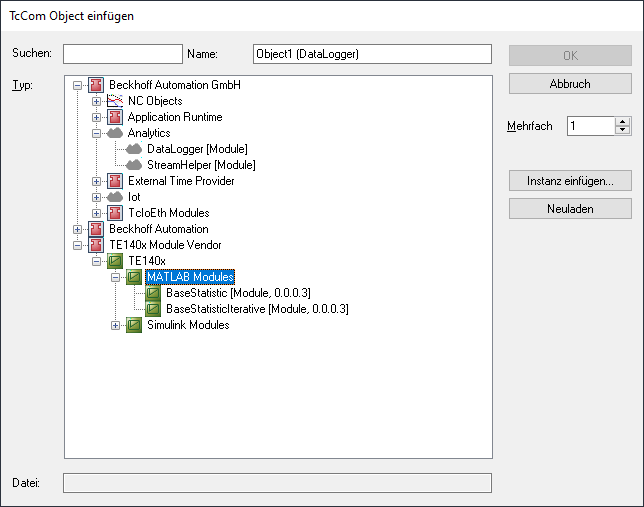
Diese Einstellungen beeinflussen die Hierarchie, in der die generierten TwinCAT-Objekte einsortiert werden. Siehe untenstehende Grafik. Hier sind die Einträge VendorName „TE140x Module Vendor“ und GroupName „TE140x|MATLAB Modules“ für MATLAB® und „TE140x|Simulink Modules“ für Simulink®.
Um die Default-Einstellungen zu verändern, können Sie auf den Dialog mit TwinCAT.ModuleGenerator.Settings.Edit in der MATLAB® Konsole zugreifen. Hier werden Ihnen auch zusätzliche Einträge angeboten, die Sie als Default hinterlegen können.