CANopen
CANopen ist eine weit verbreitete CAN-Anwendungsschicht, die im CAN-in-Automation Verband entwickelt und inzwischen zur internationalen Normung angenommen wurde.
Gerätemodell
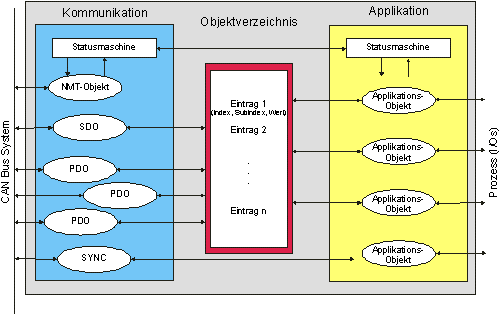
CANopen besteht aus der Protokolldefinition (Kommunikationsprofil) so wie den Geräteprofilen, die den Dateninhalt für die jeweilige Geräteklasse normieren. Zur schnellen Kommunikation der Ein- und Ausgangsdaten dienen die Prozessdatenobjekte (PDO). Die CANopen Geräteparameter und Prozessdaten sind in einem Objektverzeichnis strukturiert. Der Zugriff auf beliebige Daten dieses Objektverzeichnisses erfolgt über die Servicedatenobjekte (SDO). Weiter gibt es einige Spezialobjekte (bzw. Telegrammarten) für Netzwerkmanagement (NMT), Synchronisation, Fehlermeldungen etc.
Kommunikationsarten
CANopen definiert mehrere Kommunikationsarten für die Ein- und Ausgangsdaten (Prozessdatenobjekte):
- Ereignisgesteuert: Telegramme werden versendet, sobald sich der Inhalt geändert hat. Hier wird nicht ständig das Prozessabbild, sondern nur die Änderung desselben übertragen.
- Zyklisch synchron: Über ein SYNC Telegramm werden die Baugruppen veranlasst, die vorher empfangenen Ausgangsdaten zu übernehmen und neue Eingangsdaten zu senden.
- Angefordert: Über ein CAN Datenanforderungstelegramm werden die Baugruppen veranlasst ihre Eingangsdaten zu senden.
Die gewünschte Kommunikationsart wird über den Parameter "Transmission Type" eingestellt.
Geräteprofil
Die Beckhoff CANopen Geräte unterstützen alle E/A- Kommunikationsarten und entsprechen dem Geräteprofil für digitale und analoge Ein-/Ausgabebaugruppen (DS401).
Übertragungsraten
Neun Übertragungsraten von 10 kBaud bis 1 MBaud stehen für unterschiedliche Buslängen zur Verfügung. Durch die effektive Nutzung der Busbandbreite erreicht CANopen kurze Systemreaktionszeiten bei vergleichsweise niedrigen Datenraten.
Topologie
CAN basiert auf einer linienförmigen Topologie. Die Anzahl der Teilnehmer pro Netz ist dabei von CANopen logisch auf 128 begrenzt, physikalisch erlaubt die aktuelle Treiber-Generation bis zu 64 Knoten in einem Netzsegment. Die bei einer bestimmten Datenrate maximal mögliche Netzausdehnung ist durch die auf dem Busmedium erforderliche Signallaufzeit begrenzt. Bei 1 MBaud ist z.B. eine Netzausdehnung von 25 m, bei 50 kBaud eine Netzausdehnung von 1000 m möglich. Bei niedrigen Datenraten kann die Netzausdehnung durch den Einsatz von Repeatern erhöht werden, diese ermöglichen auch den Aufbau von Baumstrukturen.
Buszugriffsverfahren
CAN arbeitet nach dem Verfahren Carrier-Sense Multiple Access (CSMA), d.h. jeder Teilnehmer ist bezüglich des Buszugriffs gleichberechtigt und kann auf den Bus zugreifen, sobald dieser frei ist (Multi-Master-Buszugriff). Der Nachrichtenaustausch ist dabei nicht Teilnehmerbezogen sondern Nachrichtenbezogen. Das bedeutet, dass jede Nachricht mit einem priorisierten Identifier eindeutig gekennzeichnet ist. Damit beim Verschicken der Nachrichten verschiedener Teilnehmer keine Kollisionen auf dem Bus entstehen, wird beim Start der Datenübertragung eine bitweise Busarbitrierung durchgeführt. Die Busarbitrierung vergibt die Busbandbreite an die Nachrichten in der Reihenfolge ihrer Priorität, am Ende der Arbitrierungsphase belegt jeweils nur ein Busteilnehmer den Bus, Kollisionen werden vermieden und die Bandbreite wird optimal genutzt.
Konfiguration und Parametrierung
Mit dem TwinCAT System Manager können alle CANopen Parameter komfortabel eingestellt werden. Für die Parametrierung der Beckhoff CANopen Geräte mit Konfigurationstools dritter Hersteller steht ein eds-File (electronic data sheet) auf der Beckhoff Website zur Verfügung.
Zertifizierung
Die Beckhoff CANopen Geräte verfügen über eine leistungsfähige Protokollimplementierung und sind vom CAN-in- Automation Verband (CiA) zertifiziert.