CSP
CSP - cyclic synchronous position (Positionsregelung)
In der Betriebsart CSP arbeitet die EL72x1-xx1x im zyklischen Positionsinterface. Über die Variable Target position kann eine definierte Position eingestellt werden.
 | Minimale Zykluszeit Die Zykluszeit im CSP Modus muss 2^n * 125 µs betragen (mit n = 1 bis 8) |
Step-by-Step
- Fügen Sie die Klemme, wie im Kapitel Konfigurationserstellung TwinCAT - manuell oder - Online scan beschrieben, zur Konfiguration hinzu.
- Verknüpfen Sie die Klemme, wie im Kapitel Einbindung in die NC-Konfiguration beschrieben, mit der NC.
- Konfigurieren Sie den Motor mit Hilfe der Automatischen Konfiguration (nur OCT-Typen), anhand des Drive Managers oder importieren Sie die Motor XML-Datei, wie im Kapitel Einstellungen im CoE beschrieben, in das Start-up Verzeichnis.
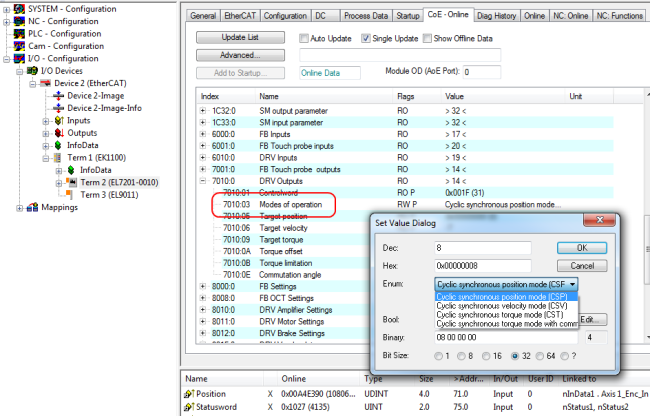
- Stellen Sie die Betriebsart im CoE-Verzeichnis auf Cyclic synchronous position mode (CSP), Abb. Auswahl Betriebsart.
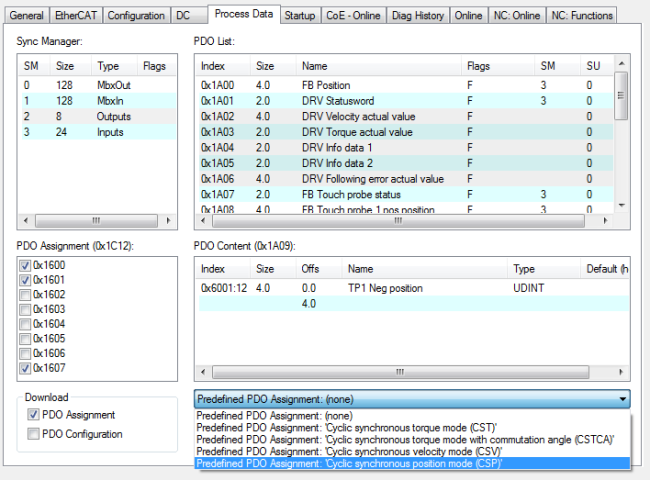
- Wählen Sie bei den Predefined PDO Assignments ebenfalls Cyclic synchronous position mode (CSP), Abb. Predefined PDO Assignment wählen.
- Aktivieren Sie die Konfiguration (Ctrl+Shift+F4)
- Durchlaufen Sie die State Machine der Klemme. Dazu gibt es zwei Möglichkeiten:
- Sie nutzen die TwinCAT NC.
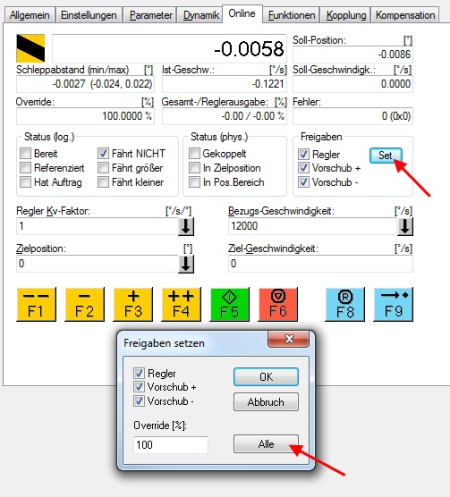
Die State Machine wird von der NC automatisch durchlaufen. Sie können in der Registerkarte "Online" der Achse die Achse freigeben.
Setzen Sie alle Häkchen und stellen Sie Override auf 100% (siehe Abb. Freigaben setzen). Anschließend kann die Achse bewegt werden. - Sie nutzen nicht die TwinCAT NC.
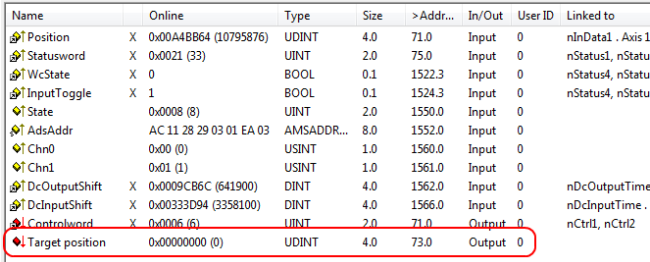
In diesem Fall müssen Sie die State Machine manuell durchfahren. Befolgen Sie dazu die Anweisungen im Kapitel Inbetriebnahme ohne die NC. - Über die zyklische Variable Target position (Abb. Vorgabe Position) können Sie eine definierte Position vorgeben. Der Wert muss mit dem berechneten Skalierungsfaktor multipliziert werden, um die korrekte Position zu erhalten.
Schleppfehlerüberwachung
Weiterhin besteht im CSP Mode die Möglichkeit, eine Schleppfehlerüberwachung einzuschalten. Im Auslieferungszustand ist die Schleppfehlerüberwachung ausgeschaltet. Bei allen anderen Modes kommt dies nicht zum Einsatz und wird ignoriert.
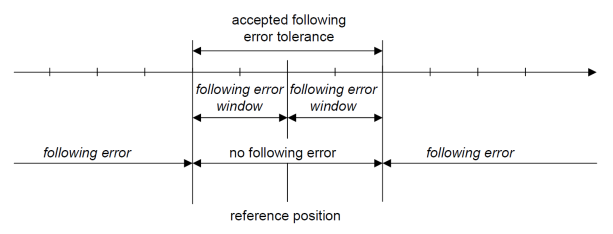
- Mit dem Following error window (Index 0x8010:50 MDP742 / Index 0x6065 DS402) lässt sich das Fenster der Schleppfehlerüberwachung einstellen. Der hier eingestellte Wert - mit dem Skalierungsfaktor multipliziert - gibt an, um welche Position die Ist-Position von der Sollposition, positiv und negativ, abweichen darf. Die gesamte akzeptierte Toleranz ist somit doppelt so groß, wie die im Following error window eingetragene Position (siehe Abb. Schleppfehlerfenster).
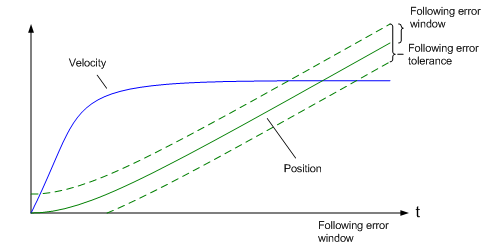
- Mit dem Following error time out (Index 0x8010:51 MDP742 / Index 0x6066 DS402) lässt sich die Zeit (in ms) einstellen, die für eine Schleppfehlerüberschreitung erlaubt ist. Sobald die Sollposition für die im Following error time out eingetragene Zeit um mehr als die im Following error window eingetragene Position überschritten wird, gibt die Klemme einen Fehler aus und bleibt unverzüglich stehen.
- Der aktuelle Schleppfehler kann im Following error actual value (Index 0x6010:09 MDP742 / Index 0x60F4 DS402) ausgelesen werden.
Der Wert 0xFFFFFF (-1) im Following error window bedeutet, dass die Schleppfehlerüberwachung ausgeschaltet ist und entspricht dem Auslieferungszustand.
Der Following error time out ist im Auslieferungszustand 0x0000 (0).