Einstellungen der automatischen Konfiguration
(Master TwinCAT 2.11 R3)
Die EL72x1-xx1x bietet dem Anwender die Möglichkeit, den angeschlossenen Motor der Baureihe AM81xx automatisch zu konfigurieren. Dabei wird das im Motor integrierte elektronische Typenschild ausgelesen und die notwendigen Parameter der Klemme entsprechend angepasst.
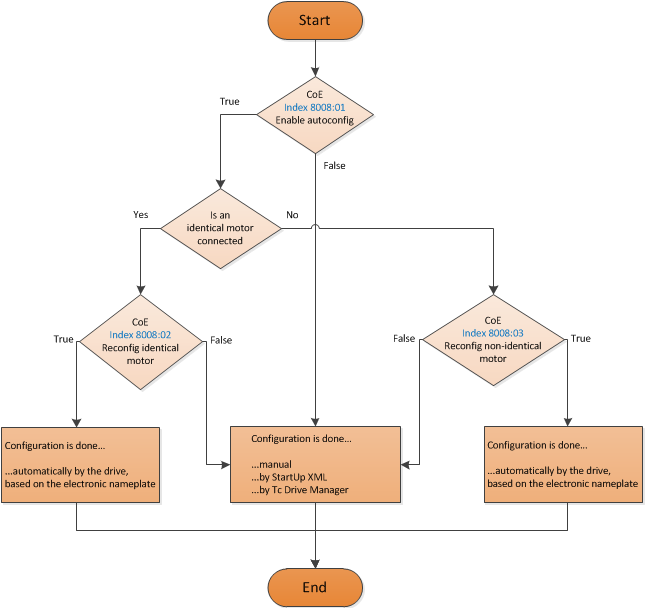
Die automatische Konfiguration ist im Auslieferungszustand ausgeschaltet. Der Anwender hat die Möglichkeit, die automatische Konfiguration entsprechend des unten ersichtlichen Flussdiagramms (siehe Abb. Flussdiagramm der automatischen Konfiguration) anzupassen.
 | Überschreibung der Parameter bei Automatischer Konfiguration Die vom Anwender manuell geänderten Parameter der Parameterliste der automatischen Konfiguration werden beim nächsten Starten automatisch überschrieben, wenn die automatische Konfiguration eingeschaltet ist. |
- Die automatische Konfiguration kann in Index 0x8008:01 (0x2018:01, DS402 Profil) Enable autoconfig eingeschaltet werden.
- In Index 0x8008:02 (0x2018:02, DS402 Profil) Reconfig identical motor kann der Anwender entscheiden, ob im Austauschfall eines identischen Motors, die Klemme den Motor automatisch neu konfigurieren soll (Einstellung = TRUE) oder der Motor mit den gespeicherten Einstellungen betrieben werden soll (Einstellung = FALSE). Die Deaktivierung dieser Funktion kann beispielsweise von Vorteil sein, wenn der Anwender den Motor speziell auf seine Anwendung eingestellt hat und diese Einstellungen nach einem Austausch des Motors nicht verlieren möchte.
- Im Index 0x8008:03 (0x2018:03, DS402 Profil) Reconfig non-identical motor kann der Anwender entscheiden, ob im Austauschfall eines nicht-identischen Motors, die Klemme den Motor automatisch neu konfigurieren soll (Einstellung = TRUE) oder der Motor mit den gespeicherten Einstellungen betrieben werden soll (Einstellung = FALSE).
Parameterliste der automatischen Konfiguration
Folgende Parameter sind von der automatischen Konfiguration betroffen.
|
Index (hex) |
Bezeichnung |
Bedeutung | |
|---|---|---|---|
|
MDP 407 Profil |
DS402 Profil | ||
|
Current loop integral time |
wird nach dem symmetrischen Optimum berechnet | ||
|
Current loop proportional gain |
wird nach dem symmetrischen Optimum berechnet | ||
|
Max. current |
wird aus dem elektronischen Typenschild des angeschlossenen Motors direkt übernommen | ||
|
Rated current |
wird aus dem elektronischen Typenschild des angeschlossenen Motors direkt übernommen | ||
|
Motor pole pairs |
wird aus dem elektronischen Typenschild des angeschlossenen Motors direkt übernommen | ||
|
Commutation offset |
wird immer auf -90° gesetzt | ||
|
Torque constant |
wird aus dem elektronischen Typenschild des angeschlossenen Motors direkt übernommen | ||
|
Rotor moment of inertia |
wird aus dem elektronischen Typenschild des angeschlossenen Motors direkt übernommen | ||
|
Winding inductance |
wird aus dem elektronischen Typenschild des angeschlossenen Motors direkt übernommen | ||
|
Motor speed limitation |
Berechnung der max. Geschwindigkeit des angeschlossenen Motors | ||
|
Motor temperature warn level |
wird aus dem elektronischen Typenschild des angeschlossenen Motors direkt übernommen | ||
|
Motor temperature error level |
wird aus dem elektronischen Typenschild des angeschlossenen Motors direkt übernommen | ||
|
Motor thermal time constant |
wird aus dem elektronischen Typenschild des angeschlossenen Motors direkt übernommen | ||
|
Release delay |
wird aus dem elektronischen Typenschild des angeschlossenen Motors direkt übernommen | ||
|
Application delay |
wird aus dem elektronischen Typenschild des angeschlossenen Motors direkt übernommen | ||
|
Brake moment of inertia |
wird aus dem elektronischen Typenschild des angeschlossenen Motors direkt übernommen | ||