FB_MTP_PIDCtrlBase
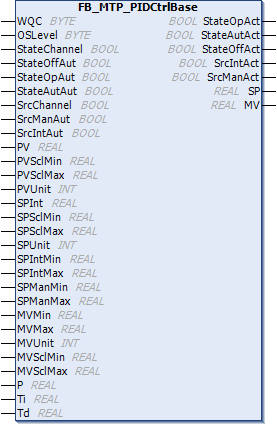
The function block FB_MTP_PIDCtrlBase serves as an interface for using a PID controller from different sources: internal PLC logic or manual operation (e. g. via OPC UA). Value specifications are managed independently of each other by the state machines of Operation Mode and Source Mode. The OPC UA access rights are described in the variable tables.
 | The |
State machines
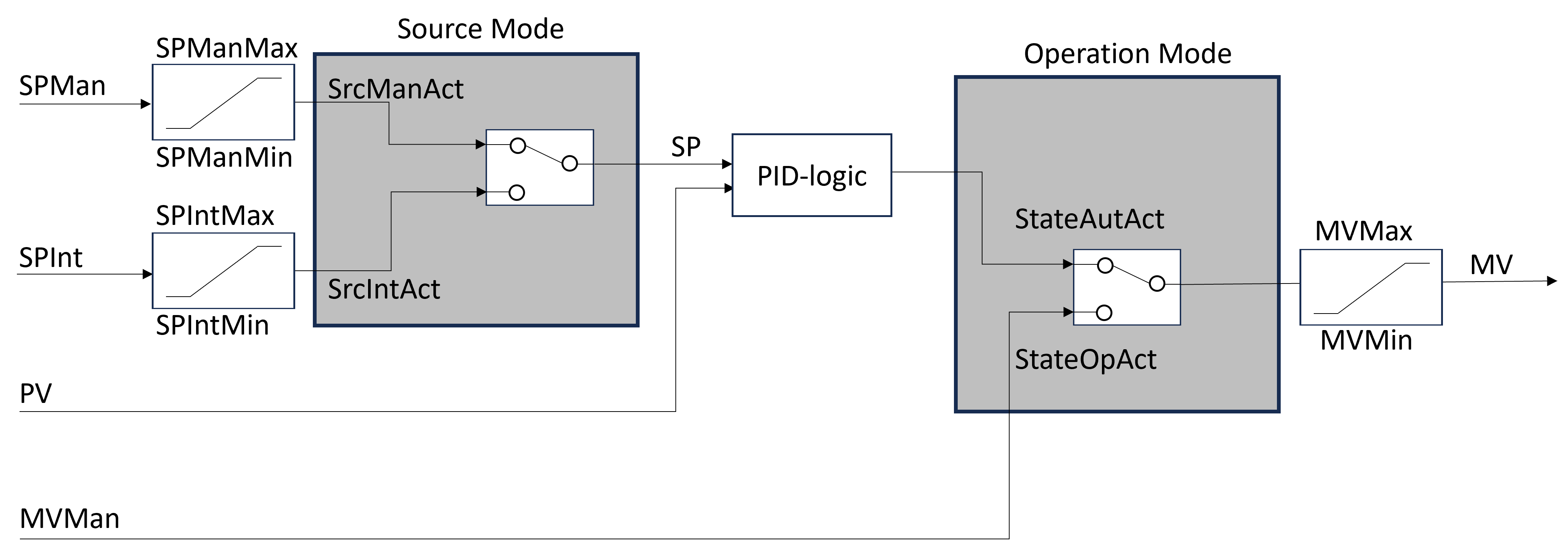
The source of the setpoint SP* is managed via the state machine of the Source Mode. The source of the output manipulated variable MV* is managed via the state machine of the Operation Mode: Output value of the PID logic or specification by manual operation MVMan.
PID controller
The PID logic (PIDLogic()) can be freely selected. The PID logic is called via the method PIDLogic(). The parameters for the controller are described via the inputs P, Ti and Td. The output MV describes the current manipulated variable depending on the current states of the state machines. The output SP shows the currently used setpoint of the PID logic.
The function block works according to the following scheme:
Further characteristics
Syntax
FUNCTION_BLOCK FB_MTP_PIDCtrl EXTENDS FB_MTP_PIDCtrlBase
VAR
///Controller Toolbox (delete if you want to use own PID Logic)
CTRL_PID: FB_CTRL_PID;
PIDParams: ST_Ctrl_PID_PARAMS;
END_VARSUPER^(); Inputs
Inputs
Name | Type | Description | OPC UA access |
|---|---|---|---|
TagName | STRING | Name of the interface | - |
TagDescription | STRING | Description of the interface | - |
WQC | BYTE | Worst Quality Code | Read |
OSLevel | BYTE | Level must be defined for system. Value 0 is reserved for local operation. | Read/write |
State* |
| See Operation Mode |
|
MVUnit | INT | Unit of manipulated variable | Read |
MVSclMin | REAL | Minimum value of the manipulated variable display | Read |
MVSclMax | REAL | Maximum value of the manipulated variable display | Read |
MVMin | REAL | Minimum value of the manipulated variable | Read |
MVMax | REAL | Maximum value of the manipulated variable | Read |
Src* |
| See Source Mode |
|
SPInt | REAL |
| Read |
SPUnit | INT | Unit of the setpoint | Read |
SPIntMin | REAL | Lower limit value of the | Read |
SPIntMax | REAL | Upper limit value of the PEA internal setpoint specification | Read |
SPManMin | REAL | Lower limit value of the manual setpoint specification | Read |
SPManMax | REAL | Upper limit value of the manual setpoint specification | Read |
SPSclMin | REAL | Minimum value for the display of the setpoint specification | Read |
SPSclMax | REAL | Maximum value for the display of the setpoint specification | Read |
PV | REAL | Process value | Read |
PVUnit | INT | Unit of the process value | Read |
PVSclMin | REAL | Minimum value for displaying the process value | Read |
PVSclMax | REAL | Maximum value for displaying the process value | Read |
P | REAL | Proportional gain of the controller | Read |
Ti | REAL | Integral action time of the controller [s] | Read |
Td | REAL | Derivative action time of the controller [s] | Read |
 Outputs
Outputs
Name | Type | Description | OPC UA access |
|---|---|---|---|
State* |
| See Operation Mode |
|
MV | REAL | Current manipulated variable of the controller |
|
Src* |
| See Source Mode |
|
SP | REAL | Setpoint currently used by the controller. |
|
External variables
Name | Type | Description | OPC UA access |
|---|---|---|---|
State* |
| See Operation Mode |
|
MVMan | REAL |
| Read/write |
Src* |
| See Source Mode |
|
SPMan | REAL |
| Read/write |
 Methods
Methods
Name | Description |
|---|---|
PIDLogic | Implementation of the logic for calling the PID controller |
ResetPID | Resetting the PID controller |