FB_BA_PIDControl
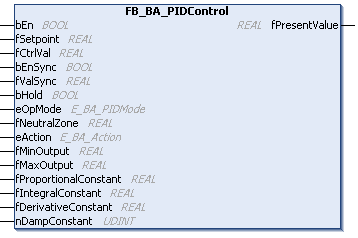
The function block FB_BA_PIDCtrl is a universal PID controller. It can be used to control individual independent controlled systems and as part of a control sequence.
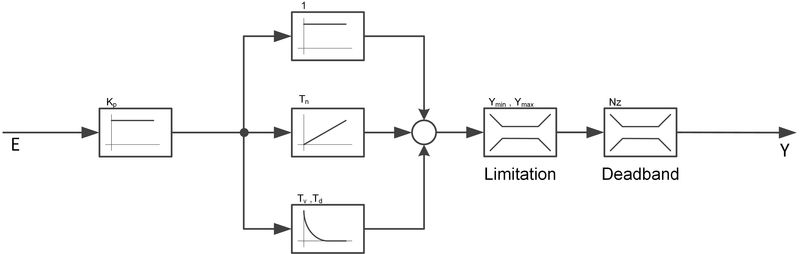
The controller is divided internally into two consecutive parts:
- the controller itself, illustrated in the functional diagrams below as P, I and D part with an output limitation.
- a deadband element (neutral zone) that applies a hysteresis to the output changes of the controller.
Operation mode "Upstream P part":
(eOpMode = E_BA_PIDMode.eP1ID)
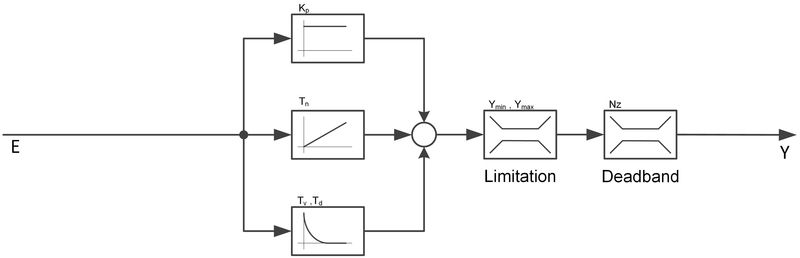
"Parallel structure" operation mode:
(eOpMode = E_BA_PIDMode.ePID )
Control direction
With eAction = E_BA_Action.eReverse, the control direction of the controller is reversed so that a control deviation of less than 0 causes a positive change in the control value. This is achieved by a negative calculation of the control deviation:
eAction | fE (control deviation) | Control direction |
|---|---|---|
E_BA_Action.eDirect | fCtrlVal-fSetpoint (actual value-setpoint) | direct (cooling) |
E_BA_Action.eReverse | fSetpoint-fCtrlVal (setpoint - actual value) | indirect (heating) |
Passive behavior (bEn = FALSE)
The outputs are set as follows:
fPresentValue | 0.0 |
The internal values for the P, I, and D parts are set to 0, also the values for the I and D parts of the preceding cycle. In case of a restart the control value is thus calculated in the first cycle without past values.
Active behavior (bEn = TRUE)
In the first cycle, the I and D parts are calculated without historical values, as already mentioned.
Anti-Reset-Windup
If the I part is active, the controller ensures that it is retained, if the controller output rY is about to move beyond the limits fMinOutput oder fMaxOutput. A preliminary calculation of the controller output takes place inside the controller in every cycle.
Anti-reset windup at min limit
If the precalculation is smaller than the lower output limit fMinOutput, the I part is prevented from falling further and is limited to the value of the last PLC cycle. However, an increase in the I part remains possible.
Anti-reset windup at max limit
On the other hand, if the precalculation is greater than the upper limit fMaxOutput, the I part is prevented from increasing further and is also limited to the value of the last PLC cycle. In this case, a drop in the I part remains possible.
Synchronizations
There are several cases where controller output must not only be limited, but also synchronized to a new value by manipulating the I part (if not active, then the D part or the P part). These cases are prioritized because of the potential for simultaneity:
Prio | Description | Conditions | Comments |
|---|---|---|---|
1 | Synchronization via bEnSync/fValSync | Controller enabled - bEn = TRUE | A positive signal on bEnSync sets the I part so that the control value assumes the value fValSync. If bEn and bEnSync are set at the same time, this method can be used to set an initial value from which the controller "sets off". If the I part is not active, the D part is set accordingly. Note that only the rising edge of bEnSync is evaluated internally as this is a Set action. A TRUE signal must be applied again to the input bEnSync for renewed synchronization, for instance with a transfer value. |
2 | Range synchronization fMinOutput | Controller enabled – bEn = TRUE fMinOutput <> fMinOutput_1 (last cycle) fPresentValue_Test < fMinOutput | If the lower range limit has changed and the precalculated controller output (fPresentValue_Test) is now smaller than fMinOutput then synchronization is performed to fMinOutput. |
3 | Range synchronization fMaxOutput | Controller enabled – bEn = TRUE fMaxOutput <> fMaxOutput_1 (last cycle) fPresentValue_Test > fMaxOutput | If the upper range limit has changed and the precalculated controller output (fPresentValue_Test) is now greater than fMaxOutput, then synchronization is performed to fMaxOutput |
4 | Synchronization with reversal of the control direction | Controller enabled – bEn = TRUE eAction <> eAction_1 (last cycle) | It is synchronized so that the output holds the value BEFORE the reversal: |
5 | Anti-Reset-Windup | Controller enabled – bEn = TRUE | See Anti-Reset-Windup. |
Neutral zone
A value of fNeutralZone > 0.0 enables the function of the neutral zone (deadband). A value equal to zero deactivates the deadband element and the values at the input are passed directly through.
If, for the active controller, the change at the input of the element in a PLC cycle is smaller than fNeutralZone / 2 in comparison with the previous PLC cycle, then the output is held at the value of the previous cycle until the change is larger than or equal to fNeutralZone / 2.
This function is intended to avoid an unnecessarily large number of actuating pulses.
Syntax
VAR_INPUT
bEn : BOOL;
fSetpoint : REAL;
fCtrlVal : REAL;
bEnSync : BOOL;
fValSync : REAL;
bHold : BOOL;
END_VAR
VAR_INPUT CONSTANT PERSISTENT
{attribute 'parameterCategory':='Config'}
eOpMode : E_BA_PIDMode := E_BA_PIDMode.ePID;
{attribute 'parameterCategory':='Deadband'}
fNeutralZone : REAL := 0.0;
{attribute 'parameterCategory':='Config'}
eAction : E_BA_Action := E_BA_Action.eReverse;
{attribute 'parameterCategory':='Config'}
fMinOutput : REAL := 0;
{attribute 'parameterCategory':='Config'}
fMaxOutput : REAL := 100;
{attribute 'parameterCategory':='Config'}
fProportionalConstant : REAL := 3;
{attribute 'parameterCategory':='Config'}
{attribute 'parameterUnit':= 's,ms'}
fIntegralConstant : REAL;
{attribute 'parameterCategory':='Config'}
{attribute 'parameterUnit':= 's,ms'}
fDerivativeConstant : REAL;
{attribute 'parameterCategory':='Config'}
{attribute 'parameterUnit':= 's'}
nDampConstant : UDINT;
END_VAR
VAR_OUTPUT
fPresentValue : REAL;
END_VAR Inputs
Inputs
Name | Type | Description |
|---|---|---|
bEn | BOOL | Enabling the controller |
fSetpoint | REAL | Setpoint of the controlled system |
fCtrlVal | REAL | Actual value of the controlled system |
bEnSync | BOOL | Synchronizes the controller to the value of fValSync. |
fValSync | REAL | Synchronization value. The value fValSync is internally limited to values from fMinOutput to fMaxOutput. |
bHold | BOOL | By applying a TRUE signal to the bHold input, the controller interrupts its internal P, I and D part calculation. This freezes the output fPresentValue as long as bHold is true. |
Inputs CONSTANT PERSISTENT
Name | Type | Description |
|---|---|---|
eOpMode | Mode of operation of the controller: PID mode or P-ID mode. | |
fNeutralZone | REAL | Dead zone |
eAction | Control direction of the controller | |
fMinOutput | TIME | Lower controller output limit [%]. The value fMinOutput is limited at the top by fMaxOutput. |
fMaxOutput | TIME | Upper controller output limit [%]. |
fProportionalConstant | REAL | Controller gain. Only affects the P part. Internally limited to a minimum value of 0. |
fIntegralConstant | REAL | Integral action time of the I part [s,ms]. A null value at this parameter disables the I part. |
fDerivativeConstant | REAL | Rate time of the D part [s,ms]. A null value at this parameter disables the D part. |
nDampConstant | UDINT | Damping time of the D part [s]. |
 Outputs
Outputs
Name | Type | Description |
|---|---|---|
fPresentValue | REAL | Control value. The value range is restricted by fYMinOutput and fYMaxOutput. |
 Properties
Properties
Name | Type | Access | Description |
|---|---|---|---|
AntiResetWindup | BOOL | Get | The controller is in anti-reset windup status. |
ControlDeviation | REAL | Get | Control deviation |
IsMaxLimit | BOOL | Get | The controller output fPresentValue is at the upper output limit fMaxOutput. |
IsMinLimit | BOOL | Get | The controller output fPresentValue is at the lower output limit fMinOutput. |
Requirements
Development environment | Required PLC library |
|---|---|
TwinCAT from v3.1.4024.56 | Tc3_BA2 from v5.4.2.0 |