FB_BA_SlidingLimit
The template represents a sliding limit value monitoring.
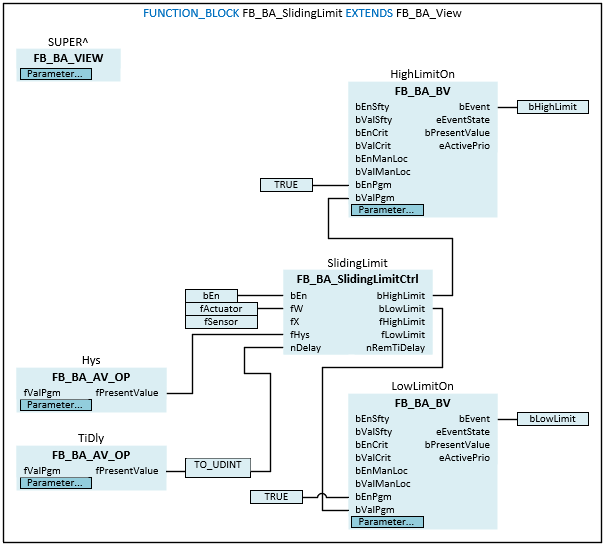
After the start, a check is made whether the actual value fSensor of the control is within the tolerance range between the lower limit value fLowLimit and the upper limit value fHighLimit of the function block SlidingLimit. If the actual value is outside this tolerance range and the delay time TiDly has expired, one of the variables bHighLimit or bLowLimit is set depending on whether the tolerance range has been left.
The binary object HighLimitOn is used to display bHighLimit and can be used as a fault message object by changing the parameterization.
The binary object LowLimitOn is used to display bLowLimit and can be used as a fault message object by changing the parameterization.
 | The initialization of the template takes place within the method FB_Init. |
Block diagram
Syntax
FUNCTION_BLOCK FB_BA_SlidingLimit EXTENDS FB_BA_View
VAR_INPUT
bEn : BOOL;
fActuator : REAL;
fSensor : REAL;
END_VAR
VAR_OUTPUT
bHighLimit : BOOL;
bLowLimit : BOOL;
END_VAR
VAR_INPUT CONSTANT
Hys : FB_BA_AV_Op;
TiDly : FB_BA_AV_Op;
HighLimitOn : FB_BA_BV;
LowLimitOn : FB_BA_BV;
END_VAR
VAR
SlidingLimit : FB_BA_SlidingLimitCtrl;
END_VAR Inputs
Inputs
Name | Type | Description |
|---|---|---|
bEn | BOOL | General enable of the template. |
fActuator | REAL | The base value of the tolerance range is connected to the input. This value can be, for example, a valve position. |
fSensor | REAL | The analog value to be monitored is connected to the input. This value could, for example, be the feedback signal of a valve. |
 Outputs
Outputs
Name | Type | Description |
|---|---|---|
bHighLimit | BOOL | The output indicates that the upper limit value of the tolerance range has been exceeded. |
bLowLimit | BOOL | The output indicates that the value has fallen below the lower limit of the tolerance range. |
Inputs CONSTANT
Name | Type | Description |
|---|---|---|
Hys | Analog value object for entering the hysteresis of the tolerance range. Lower limit of the function block SlidingLimit: fLowLimit = fActuator - (Hys / 2) Upper limit of the function block SlidingLimit: fHighLimit = fActuator + (Hys / 2) | |
TiDly | Analog value object for entering the response delay of the outputs bHighLimit and bLowLimit. | |
HighLimitOn | The binary object is used to display bHighLimit and can be used as a fault message object by changing the parameterization. | |
LowLimitOn | The binary object is used to display bHighLimit and can be used as a fault message object by changing the parameterization. |