FB_BA_SlidingLimitCtrl
The function block FB_BA_SlidingLimitCtrl is used to monitor a sliding setpoint.
The input bEn is used for general enabling of the function block.
To check the function of a control system, the actual value is compared with the setpoint of the controlled system.
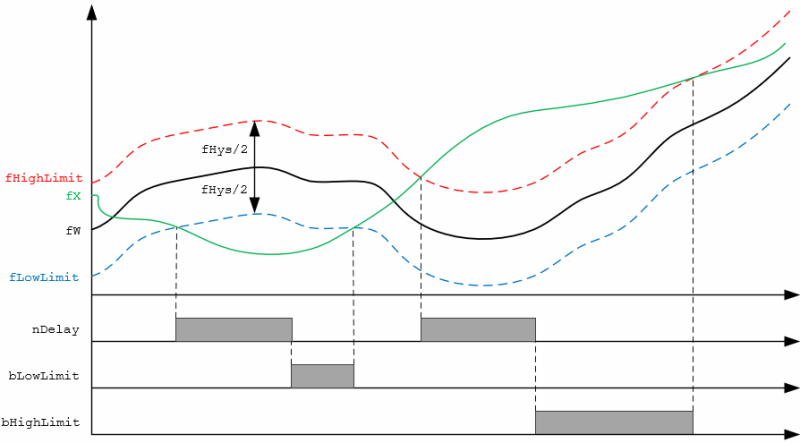
If the deviation between the setpoint and the actual value is within the tolerance range fHys, then the control system is OK. If the actual value deviates from the setpoint by an amount outside this tolerance range over an extended period, the timer nDelay is started. After the timer has expired, if the control deviation remains, either the output bLowLimit or bHighLimit TRUE of the function block outputs a message.
 Inputs
Inputs
VAR_INPUT
bEn : BOOL;
fW : REAL;
fX : REAL;
fHys : REAL;
nDelay : UDINT;
ENDVARName | Type | Description |
|---|---|---|
bEn | BOOL | General enable of the function block. If bEn is FALSE, the message outputs bHighLimit and bLowLimit are also FALSE. |
fW | REAL | Setpoint |
fX | REAL | Actual value |
fHys | REAL | Hysteresis |
nDelay | UDINT | Response delay [s] of the outputs bHighLimit/bLowLimit. |
 Outputs
Outputs
VAR_OUTPUT
bHighLimit : BOOL;
bLowLimit : BOOL;
fHighLimit : REAL;
fLowLimit : REAL;
nRemTiDelay : UDINT;
END_VARName | Type | Description |
|---|---|---|
bHighLimit | BOOL | Upper limit value reached. |
bLowLimit | BOOL | Lower limit value reached. |
fHighLimit | REAL | Output of the upper limit value. fHighLimit = fW + (fHys / 2) |
fLowLimit | REAL | Output of the lower limit value. fLowLimit = fW - (fHys / 2) |
nRemTiDelay | UDINT | Remaining time after exceeding a limit value until one of the outputs bHighLimit or bLowLimit is set. The default comes from nDelay. |
Requirements
Development environment | Required PLC library |
|---|---|
TwinCAT from v3.1.4024.22 | Tc3_BA2 from v5.2.5.0 |