FB_BA_Mot3st
The template is used for the control of a three-step motor with fault signal, e.g. a fan.
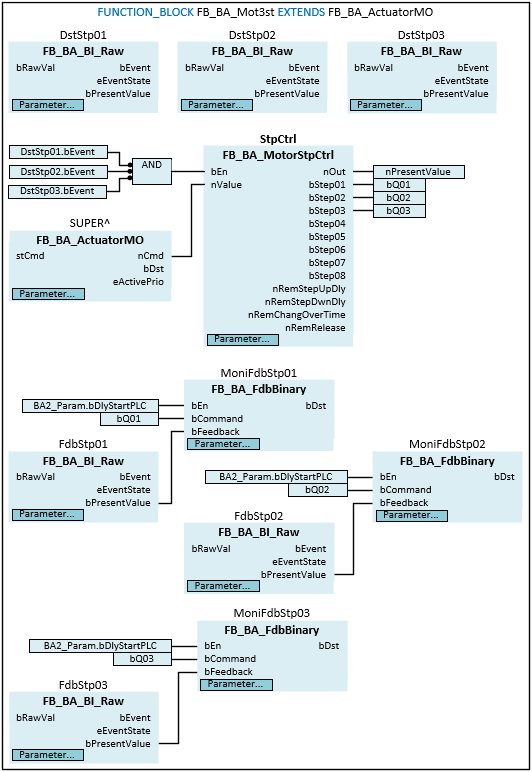
It mainly consists of the function block StpCtrl and the base class FB_BA_ActuatorMO for the control of a multi-stage aggregate and the collection of all safety-relevant faults.
The BI objects DstStp01, DstStp02 and DstStp03 indicate faults in the respective steps.
The two templates MoniFdbStp01, MoniFdbStp02 and MoniFdbStp03 are used for feedback monitoring of steps 1 + 2 + 3, FdbStp01, FdbStp02 and FdbStp03.
 | The initialization of the template takes place within the method FB_Init. |
Block diagram
Syntax
FUNCTION_BLOCK FB_BA_Mot3st EXTENDS FB_BA_ActuatorMO
VAR_OUTPUT
nPresentValue : UDINT;
bQ01 : BOOL;
bQ02 : BOOL;
bQ03 : BOOL;
END_VAR
VAR_INPUT CONSTANT
DstStp01 : FB_BA_BI_Raw;
DstStp02 : FB_BA_BI_Raw;
DstStp03 : FB_BA_BI_Raw;
FdbStp01 : FB_BA_BI_Raw;
FdbStp02 : FB_BA_BI_Raw;
FdbStp03 : FB_BA_BI_Raw;
MoniFdbStp01 : FB_BA_FdbBinary;
MoniFdbStp02 : FB_BA_FdbBinary;
MoniFdbStp03 : FB_BA_FdbBinary;
StpCtrl : FB_BA_MotorStpCtrl;
END_VAR Outputs
Outputs
Name | Type | Description |
|---|---|---|
nPresentValue | UDINT | Current control step of the motor. |
bQ01 | BOOL | Variable for controlling step 1 of the motor. This variable must be linked to a bus terminal. |
bQ02 | BOOL | Variable for controlling step 2 of the motor. This variable must be linked to a bus terminal. |
 Inputs CONSTANT
Inputs CONSTANT
Name | Type | Description |
|---|---|---|
DstStp01 | Binary input object is used to process the step 1 motor fault. | |
DstStp02 | Binary input object is used to process the step 2 motor fault. | |
DstStp03 | Binary input object is used to process the step 3 motor fault. | |
FdbStp01 | Binary input object is used to process the feedback of step 1 of the motor. | |
FdbStp02 | Binary input object is used to process the feedback of step 2 of the motor. | |
FdbStp03 | Binary input object is used to process the feedback of step 3 of the motor. | |
MoniFdbStp01 | Template that monitors the feedback of step 1 of the motor. | |
MoniFdbStp02 | Template that monitors the feedback of step 2 of the motor. | |
MoniFdbStp03 | Template that monitors the feedback of step 3 of the motor. | |
StpCtrl | The function block StpCtrl receives the numerical switch value from the base class FB_BA_ActuatorMO and converts the switch value into individual control steps. |