Overview
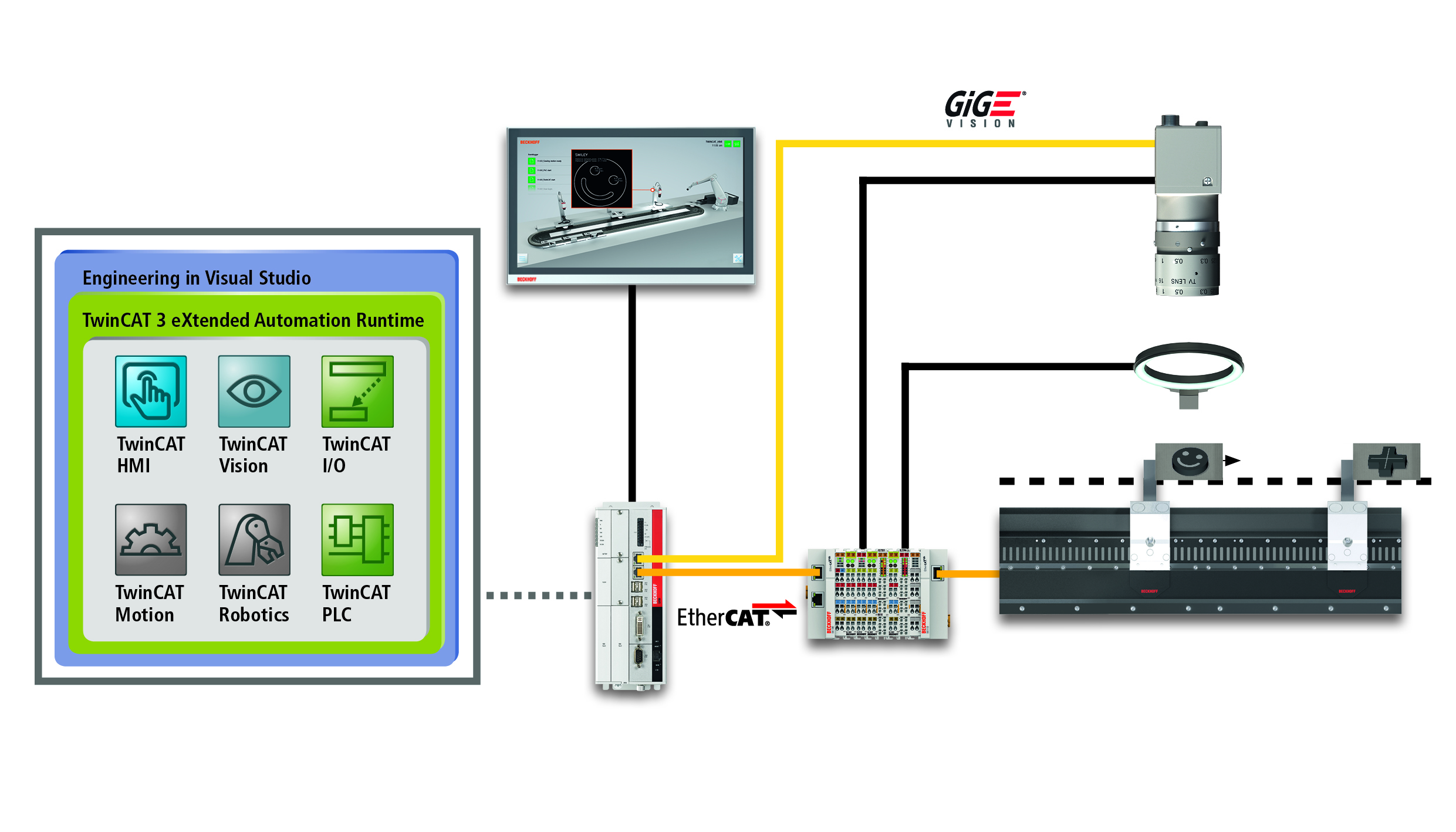
TwinCAT Vision is a TwinCAT 3 function for machine vision. Tasks such as the detection, identification, and measurement of objects can be executed directly in the PLC in real-time. By integrating image processing into the TwinCAT platform, highly synchronized control processes and extremely short response times can be achieved. Application development is supported by a wide range of existing TwinCAT Engineering tools.
Image processing sequences are programmed in the IEC61131-3 languages using the Tc3_Vision library directly in the PLC code. Alternatively, programming can also be carried out in TwinCAT 3 C++. Intermediate results can be checked directly using an image display tool.
TwinCAT Vision is real-time capable because the image processing algorithms are executed synchronously with the controller directly in the TwinCAT 3 runtime environment. In addition, suitable algorithms can be executed automatically in parallel across multiple CPU cores.
A large number of industrial cameras can be connected via the GigE Vision interface. The familiar TwinCAT development environment is used for configuring and calibrating cameras, and for system setup and debugging.
The individual chapters provide detailed information on the following topics:
- System components for understanding the system structure of TwinCAT Vision
- Installation for installation and licensing instructions
- First steps for a quick introduction to TwinCAT Vision
- Development environment for configuration, calibration and simulation of cameras
- API reference (software documentation)
- Examples of some image processing sequences
- Notes on troubleshooting