F_VN_MedianFilter

Apply a Median filter to an image.
Syntax
Definition:
FUNCTION F_VN_MedianFilter : HRESULT
VAR_INPUT
ipSrcImage : ITcVnImage;
ipDestImage : Reference To ITcVnImage;
nFilterSize : UDINT;
hrPrev : HRESULT;
END_VAR
 Inputs
Inputs
|
Name |
Type |
Description |
|---|---|---|
|
ipSrcImage |
Source image (for nFilterSize 3 or 5: USINT, UINT, REAL. For bigger filters, only USINT is supported. | |
|
ipDestImage |
Reference To ITcVnImage |
Destination image (An appropriate destination image will be created if required.) |
|
nFilterSize |
UDINT |
Size (width and height) of the filter (3, 5, 7, ...) |
|
hrPrev |
HRESULT indicating the result of previous operations (If SUCCEEDED(hrPrev) equals false, no operation is executed.) |
 Return value
Return valueFurther information
The function F_VN_MedianFilter applies a median filter to the input image.
Algorithm
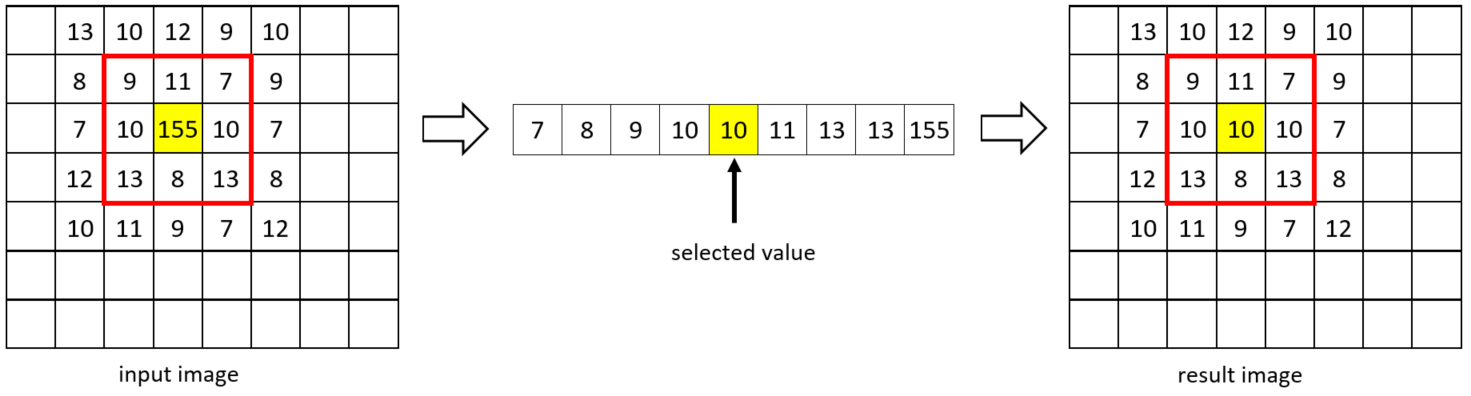
The median filter is a ranking filter that is often used to suppress noise. All pixel values captured by the filter matrix are sorted by size, then the current value is replaced by the value at the center position of the sorted list. The advantage over a filter with a weighted mean value (e.g. a Gaussian filter) is that strong outliers of individual pixels (such as the 155 in the following sample image) are completely ignored and thus do not have a negative effect on the result.
The size of the filter matrix is specified by nFilterSize, only odd integers >= 3 being accepted.
Parameter
Input image
The input image ipSrcImage can have any number of channels. The element types USINT; UINT and REAL are permitted with a filter size nFilterSize of 3 or 5. Only the element type USINT is supported for larger filters.
Result image
The result image ipDestImage returns the filtered image.
Filter size
The filter size nFilterSize defines the height and width of the filter area. It must be an odd number and >= 3.
Application
The application of a median filter with the size 7×7 looks like this, for example:
hr := F_VN_MedianFilter(
ipSrcImage := ipImageIn,
ipDestImage := ipImageRes,
nFilterSize := 7,
hrPrev := hr
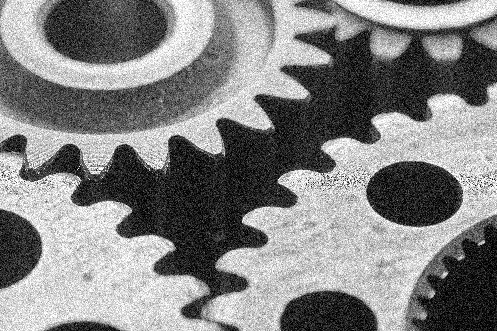
);The unprocessed original image (1st row) already exhibits fine structures on the surface of the gear wheels in the detail. In order to illustrate the effects of the filters, additional disturbances were added to the original image by Gauss noise (2nd row) and salt-and-pepper noise (3rd row).
Original images | Result images |
|
|
|
|
|
|





Samples
Required License
TC3 Vision Base
System Requirements
|
Development environment |
Target platform |
PLC libraries to include |
|---|---|---|
|
TwinCAT V3.1.4024.59 or later |
PC or CX (x64) with min. PL50, e.g. Intel 4-core Atom CPU |
Tc3_Vision |