F_VN_DarkBorderObjects

Find dark objects connected to the image border within a gray-scale single-channel image. (equivalent to filling holes)
Syntax
Definition:
FUNCTION F_VN_DarkBorderObjects : HRESULT
VAR_INPUT
ipSrcImage : ITcVnImage;
ipDestImage : Reference To ITcVnImage;
hrPrev : HRESULT;
END_VAR
 Inputs
Inputs
|
Name |
Type |
Description |
|---|---|---|
|
ipSrcImage |
Source image (USINT, UINT, INT, REAL, or LREAL, 1 channel) | |
|
ipDestImage |
Reference To ITcVnImage |
Destination image (An appropriate destination image will be created if required.) |
|
hrPrev |
HRESULT indicating the result of previous operations (If SUCCEEDED(hrPrev) equals false, no operation is executed.) |
 Return value
Return valueFurther information
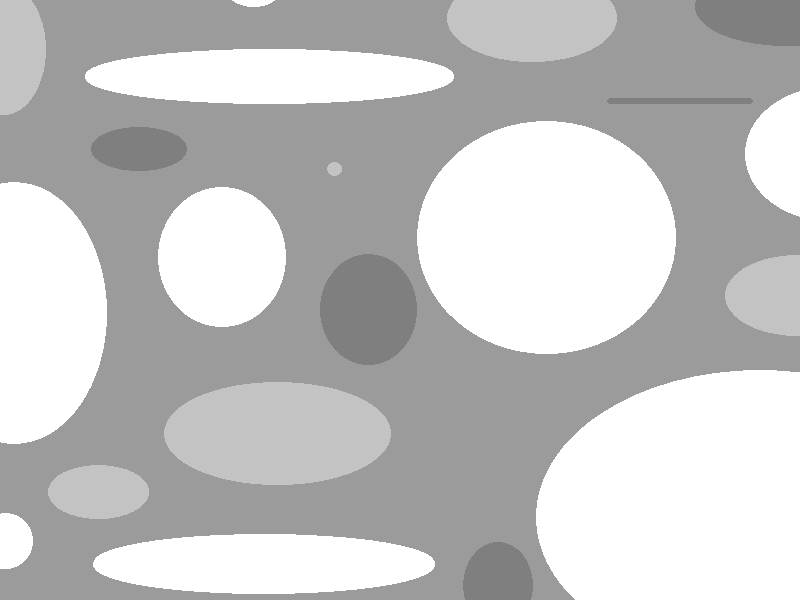
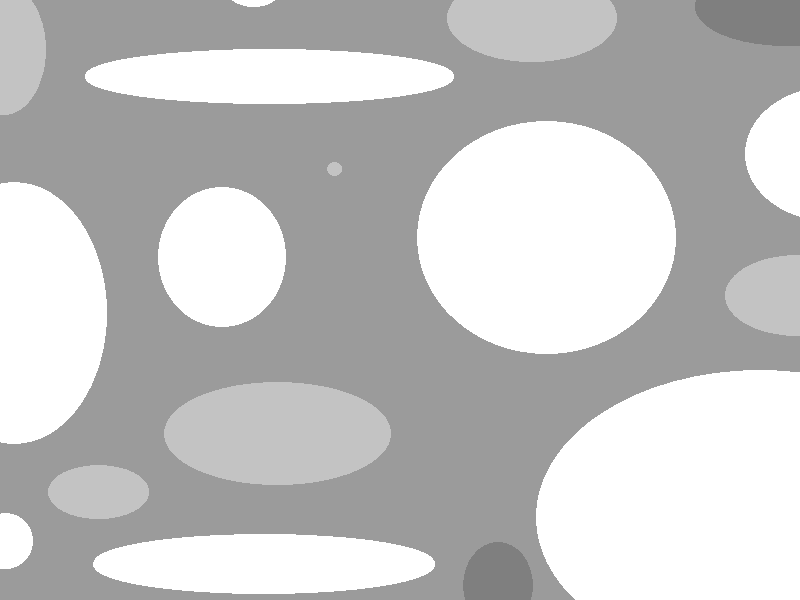
This function transfers all dark border objects in the input image to the result image.
Algorithm
All objects in the image that are darker than the surrounding pixels are removed.
Parameter
Input image
The input image ipSrcImage may only have one channel and must have one of the following element types: USINT, UINT, INT, REAL or LREAL.
Result image
The result image ipDestImage returns the dark border objects.
Application
hr := F_VN_DarkBorderObjects(
ipSrcImage := ipImageIn,
ipDestImage := ipImageRes,
hrPrev := hr
);Input image | Result image |
|
|
Related functions
- F_VN_FillHoles als Alias
- F_VN_BrightBorderObjects
Required License
TC3 Vision Base
System Requirements
|
Development environment |
Target platform |
PLC libraries to include |
|---|---|---|
|
TwinCAT V3.1.4024.59 or later |
PC or CX (x64) with min. PL50, e.g. Intel 4-core Atom CPU |
Tc3_Vision |