Configuring the CA-Group for Collision Avoidance
In principle, the configuration described here applies to all motion objects in the Advanced Motion Pack.
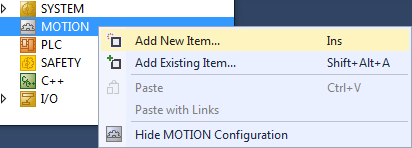
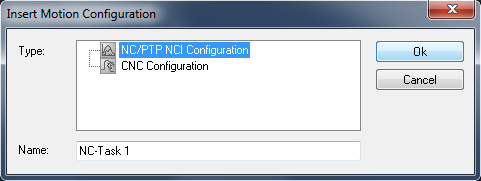
- 1. Add a new NC/PTP NCI configuration in the Motion section.
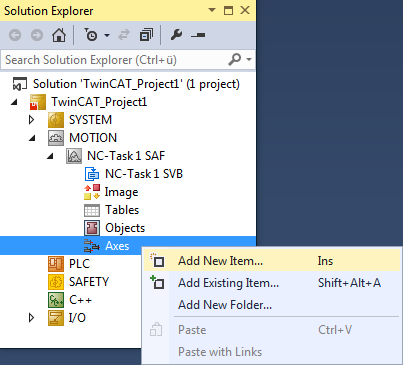
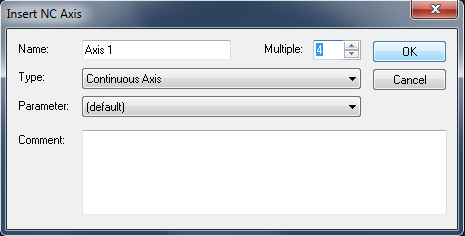
- 2. Add all axes to the NC configuration.
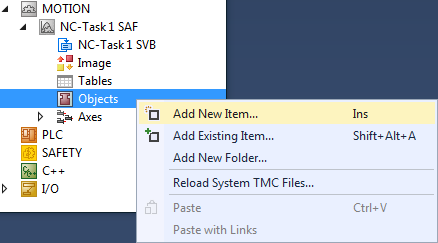
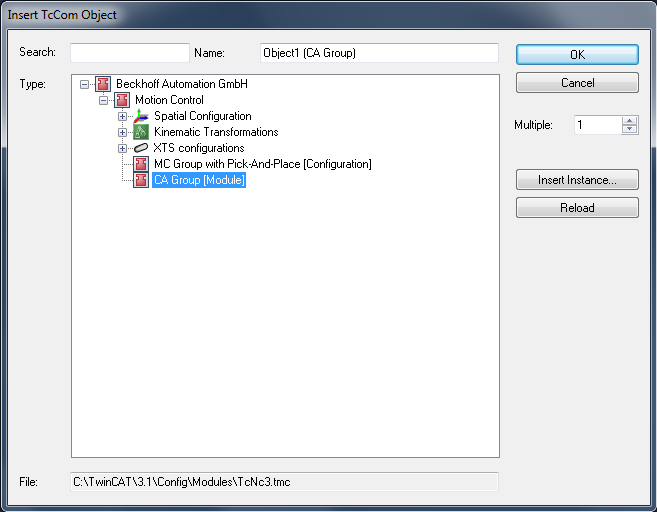
- 3. Add the corresponding group to the Objects entry in the NC configuration:
For coordinated movement, multi-dimensional movements: CA Group (TF5410 TwinCAT 3 Collision Avoidance).
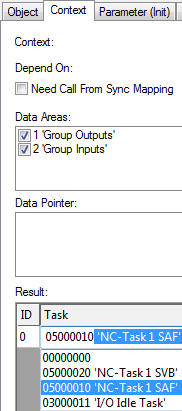
- 4. Check the execution task in the group. This must always be set to "NC-Task 1 SAF".
- 5. Configure the group parameters according to the desired application.
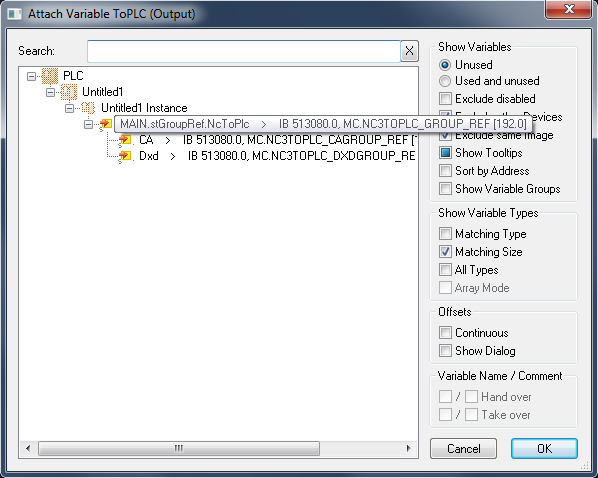
For further explanation of the group parameters, see CA Group (TF5410 TwinCAT 3 Collision Avoidance). - 6. To address the group from the PLC, a cyclic interface must be declared and linked to the I/Os of the group (see PLC library Tc3_McCoordinatedMotion). To address and enable the axes, the library Overview must be added to the project.
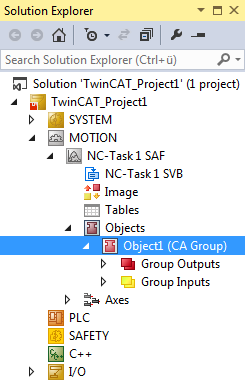
- A new NC/PTP NCI configuration has been created.
VAR
stGroupRef : AXES_GROUP_REF;
END_VAR 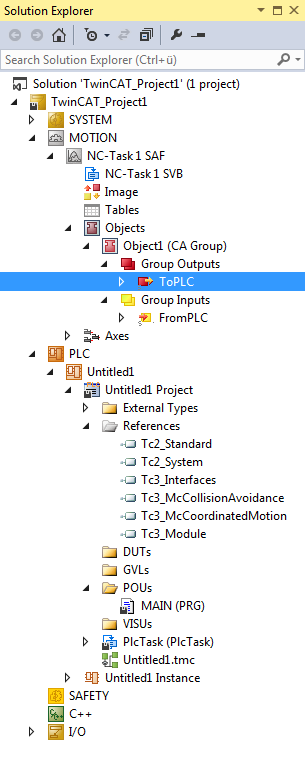
Further Information