CA Group (TF5410 TwinCAT 3 Collision Avoidance)
The CA group links axes to add Collision Avoidance to the PTP functionalities.
Dynamic values
- Velocity Vel: velocity,
- Acceleration Acc: positive acceleration,
- Deceleration Dec: braking acceleration, negative acceleration,
- Jerk: jerk.
Setpoints
|
|
CA Group
|
|
Axis
|
|
Gap
Neighborhood
|
|
Counting direction
|
|
Successor;
|
|
Size
|
|
Lower
|
|
Gap Control
|
|
Gap Control
|
|
Opening the dialog “Parameter (Init)”
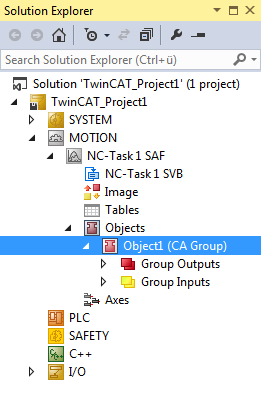
Root node of a CA group.
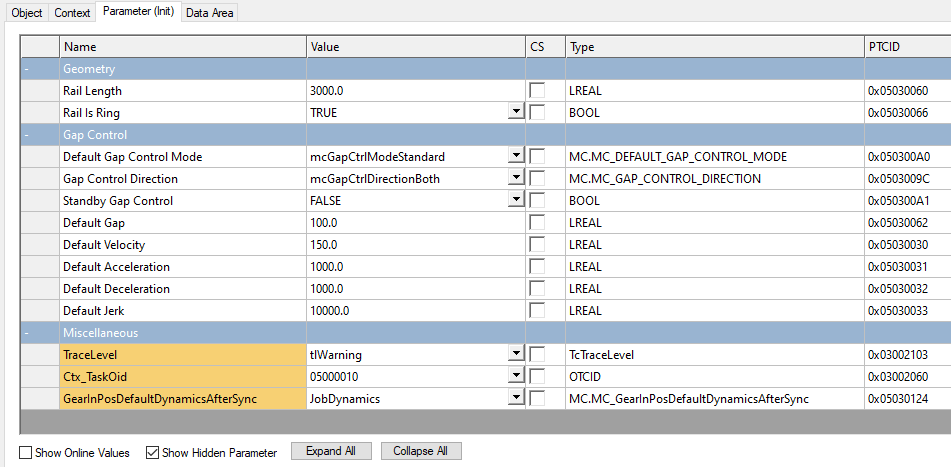
Parameters for a CA group.
The table column "Value" shows the preset parameter value. The table column "Comment" contains brief parameter descriptions.
Parameter | Description |
|---|---|
Geometry |
|
Rail Length | Length of the rail on which the axes (movers) are mounted. |
Rail Is Ring | Indicates whether the rails form a closed circle. In this case (TRUE), Collision Avoidance is enabled between the first mover in the row and the last mover. |
Gap Control |
|
Default Gap Control Mode | Different modes are available for gap control (see "MC_DEFAULT_GAP_CONTROL_MODE"). |
Gap Control Direction | Various settings are available for the control direction of the Gaps (see section "MC_GAP_CONTROL_DIRECTION“). |
Active Gap Establishing | From version 3.3, 'Collision Avoidance' does not trigger any active movement and only intervenes in the motion profile with a delay. The behavior of version 3.2, in which the 'Collision Avoidance' triggered an active movement to establish the parameterized gap, can be restored by setting the 'Active Gap Establishing' parameter in the CA group to 'True'. From version 3.3, this is set to 'False' by default. |
Standby Gap Control | If TRUE, Collision Avoidance is always active, even if no motion command was issued to the axis. |
Default Gap | This gap is used for the Standby Gap Control and if no gap was specified at any CA motion command. |
Default Velocity | This velocity is used for Standby Gap Control, i.e. when no motion command is active (e.g. directly after MC_GroupEnable). It is not used as a default velocity for any motion command if no velocity was specified. |
Default Acceleration | This acceleration is used for Standby Gap Control, i.e. when no motion command is active (e.g. directly after MC_GroupEnable). It is not used as a default acceleration for any motion command if no acceleration was specified. |
Default Deceleration | This deceleration is used for Standby Gap Control, i.e. when no motion command is active (e.g. directly after MC_GroupEnable). It is not used as a default deceleration for any motion command if no deceleration was specified. |
Default Jerk | This jerk is used for Standby Gap Control, i.e. when no motion command is active (e.g. directly after MC_GroupEnable). It is not used as a default jerk for any motion command if no jerk was specified. |
GearInPosDefaultDynamicsAfterSync (hidden!) | Specifies the default dynamics used in MC_GearInPosCA AfterSyncDynamics. In the default state, the value "JobDynamics" is set. The parameter is not available for older projects (created with versions < 3.1.10), but is set internally to 'MaximumSlaveDynamics'. |
 | After reloading the TMC file, "JobDynamics" is set as the default value (see MC_GearInPosDefaultDynamicsAfterSync). |
- If an NC configuration has already been added, the MOTION subtree contains an SAF task subtree.
- The SAF task subtree contains the "Objects" subtree.
- The "Objects" subtree can contain a CA group.
- 1. Double-click the root node of the CA group whose parameters you want to view or set.
- 2. Select the "Parameter (Init)" tab.
- The dialog “Parameter (Init)” is opened.
- It contains a table with parameters for the selected CA group.
- These parameters are divided into the groups "Geometry", "Gap Control" and "Misc.", if applicable.