Configuring the workspace
The workspace for conveyor tracking is a cuboid. The cuboid is described in the machine coordinate system (MCS) using P-CHAN-00859 to P-CHAN-00864 as shown in the figure below.
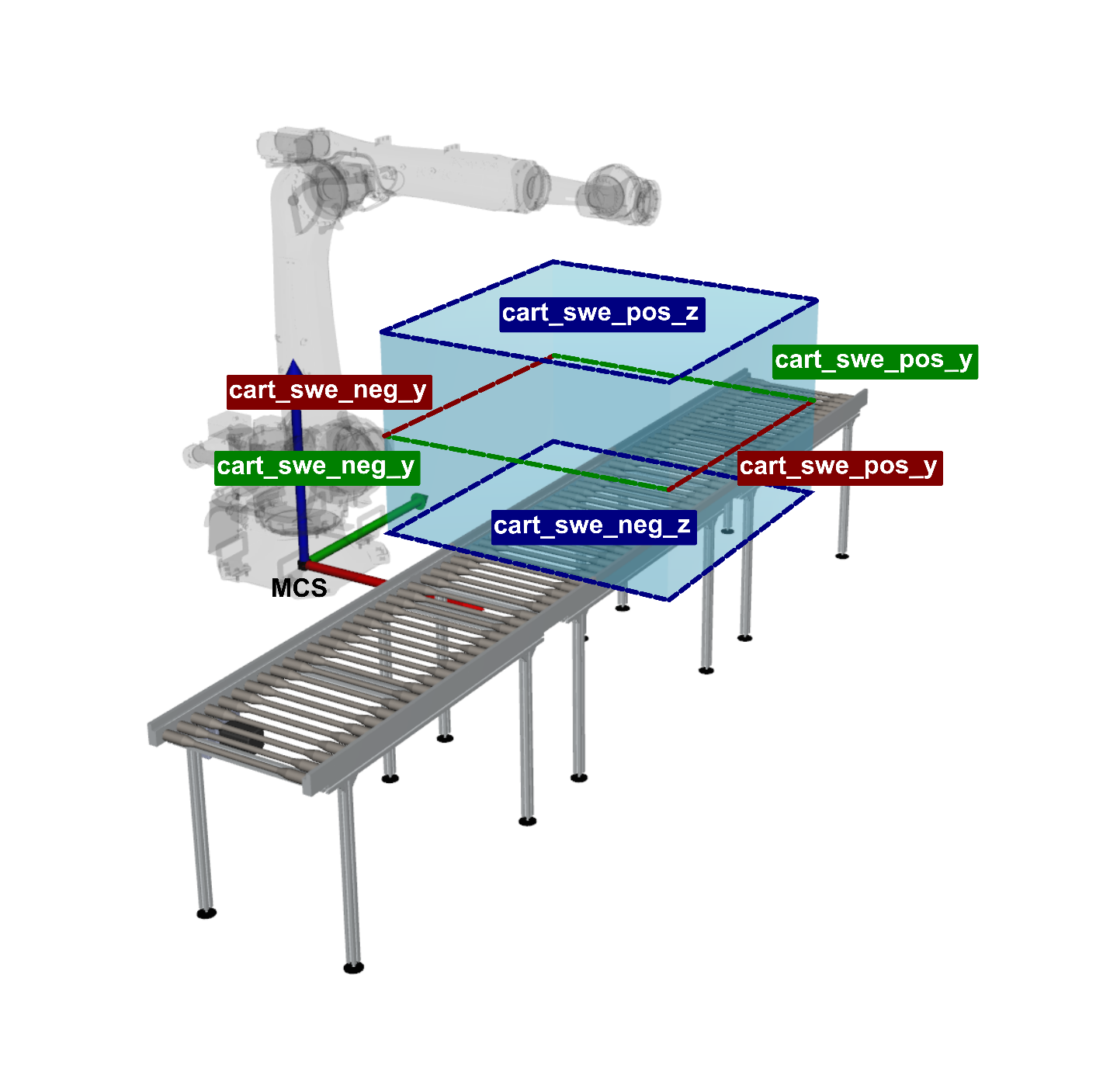
The parameters describe the upper and lower workspace limits in the axes X, Y and Z of the MCS. The workspace cannot be rotated. This is why the workspace axes run parallel to the MCS axes.
 | If the parameters P-CHAN-00859 - P-CHAN-00864 are not configured, the configured software limit switches (P-AXIS-00177 / P-AXIS-00178) of the first three axes are used to define the workspace. This is why the workspace limits must always be configured when a kinematic transformation is used. |
The function for monitoring workspace limits, see “Monitoring the workspace limit in the opposite conveying direction”. is only active while synchronisation with the conveyor system is active.