Dynamics of measurement run
For a measurement run with G100 or G310, the dynamic parameters for a rapid traverse block G00 are used by default.
However, the effective dynamics (accelerations and ramp times) in a measuring block can be influenced by several channel parameters.
The following two tables provide an overview of these parameters and their effectiveness for
- linear and
- non-linear (jerk-limited)
acceleration profile.
Overview of parameters used
Parameter number | Name | Overview |
use_drive_curr_limit | Valid deceleration ramp at FEEDHOLD | |
meas_deceleration_mode | Active delay with measuring signal | |
meas_use_std_dynamic | Active dynamic for measurement run | |
|
|
|
P-AXIS-00001 | getriebe[i].slope_profil.a_beschl | Acceleration at machining feed |
P-AXIS-00002 | getriebe[i].slope_profil.a_brems | Deceleration at machining feed |
P-AXIS-00004 | getriebe[i].slope_profil.a_grenz | Acceleration at rapid movement |
P-AXIS-00005 | getriebe[i].lslope_profil.a_grenz_stufe_1 | Acceleration step 1 in rapid mode |
P-AXIS-00006 | getriebe[i].lslope_profil.a_grenz_stufe_2 | Acceleration step 2 in rapid mode |
P-AXIS-00011 | getriebe[i].lslope_profil.a_stufe_1 | Acceleration of step 1 (linear slope) |
P-AXIS-00012 | getriebe[i].lslope_profil.a_stufe_2 | Acceleration of step 2 (linear slope) |
P-AXIS-00024 | getriebe[i].lslope_profil.a_feedh | Deceleration for feedhold (linear slope) |
P-AXIS-00053 | getriebe[i].slope_profil.a_feedh | Deceleration at feedhold (non-linear slope) |
P-AXIS-00280 | getriebe[i].lslope_profil.d_grenz_stufe_1 | Deceleration of step 1 in rapid mode (linear slope) |
P-AXIS-00281 | getriebe[i].lslope_profil.d_grenz_stufe_2 | Deceleration of step 2 in rapid mode (linear slope) |
P-AXIS-00282 | getriebe[i].lslope_profil.d_stufe_1 | Deceleration of step 1 (linear slope) |
P-AXIS-00283 | getriebe[i].lslope_profil.d_stufe_2 | Deceleration of step 2 (linear slope) |
Dynamics for measurement travel with non-linear slops
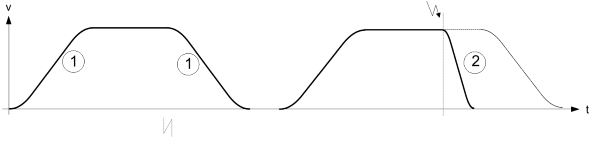
Active dynamic for measurement run | Active delay with measuring signal | Valid deceleration ramp at FEEDHOLD | Profile dynamic (1) (limiting algorithm) measurement signal inactive | Deceleration ramp (2) (limiting algorithm) measurement signal active |
0 | 0 | 0 | Acceleration in rapid traverse P-AXIS-00004 | Acceleration in rapid traverse P-AXIS-00004 |
0 | 0 | 1 | Acceleration in rapid traverse P-AXIS-00004 | Deceleration at feedhold P-AXIS-00053 |
0 | 1 | X | Acceleration in rapid traverse P-AXIS-00004 | Acceleration in rapid traverse P-AXIS-00004 |
1 | X | X | Acceleration at machining P-AXIS-00001 or delay at machining | Deceleration at feedhold P-AXIS-00053 |
Dynamics for measurement travel with non-linear slops
Active dynamic for measurement run | Active delay with measuring signal | Valid deceleration ramp at FEEDHOLD | Profile dynamic (1) | Deceleration ramp (2) measurement signal active |
0 | 0 | 0 | Acceleration in rapid traverse P-AXIS-00005/ P-AXIS-00006 or delay at machining P-AXIS-00280/ P-AXIS-00281 | Acceleration in rapid traverse P-AXIS-00005/ P-AXIS-00006 or delay at machining P-AXIS-00280/ P-AXIS-00281 |
0 | 0 | 1 | Acceleration in rapid traverse P-AXIS-00005/ P-AXIS-00006 or delay at machining P-AXIS-00280/ P-AXIS-00281 | Deceleration at feedhold P-AXIS-00024 |
0 | 1 | X | Acceleration in rapid traverse P-AXIS-00005/ P-AXIS-00006 or delay at machining P-AXIS-00280/ P-AXIS-00281 | Acceleration in rapid traverse P-AXIS-00004 |
1 | X | X | Acceleration at machining P-AXIS-00011/ P-AXIS-00012 or delay at machining P-AXIS-00282/ P-AXIS-00283 | Deceleration at feedhold P-AXIS-00024 |