"INDIRECT" mode
"INDIRECT" mode (P-AXIS-00753) can be used if the measuring system does not include the vibration to be damped (P-AXIS-00751). The mechanical vibration is simulated by a digital filter:
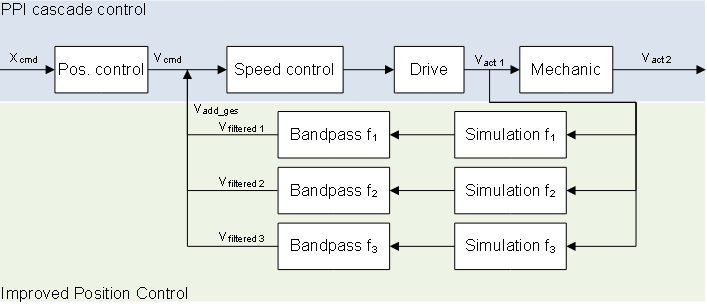
The filer cascade is identical to the “DIRECT” mode.
A simulation of the mechanical vibration can be executed by specifying a separate damping ratio (P-AXIS-00850) for each of the frequencies to be damped. The simulation results are handled in the same way as the results from measurements taken by a direct measuring system in “DIRECT” mode..
The simulated frequency spectrum is reduced by a suitable band-pass filter to the appropriate frequency in each case. Optionally, the phase length of the filtered speed can be adapted by parameterising an all-pass filter.
Finally, the results of the individual filter paths are added.
After scaling the resulting speed, an additional additive speed (vIPC) is added to the manipulated variable of the position controller (vCmd) This causes the motor to actively counteract the vibration in each case.
Advantage of "INDIRECT" mode
Compared to *DIRECT" mode, "INDIRECT" mode offers the advantage of producing strong excitation in the simulation, even for weak vibrations that are not visible in the motor actual values or from the direct measuring system. This allows the "Improved Position Control" function to damp vibrations that are not suitable for *DIRECT" mode.
Notice | |
Excessive scaling of the additive speed may cause the motor to vibrate. Consequence: The control loop becomes unstable. |
Notice | |
At high frequencies, a phase shift of the output additive speed may occur due to the dead time of the simulation. Consequence: Vibrations may be intensified instead of being damped. |
Notice | |
Low damping ratios may cause the output of high additive speeds. Consequence: The drive may be excited to vibrate. |