Weighting of jerk at block transition (P-AXIS-00154)
P-AXIS-00154 | Weighting of jerk at block transition | |
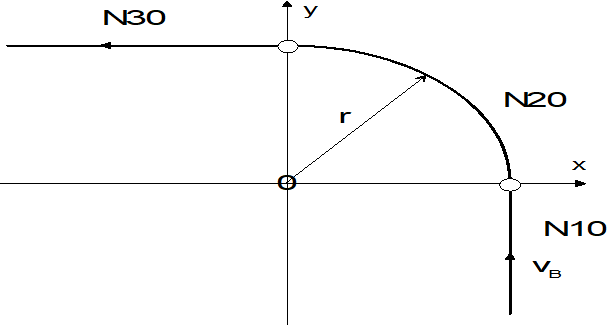
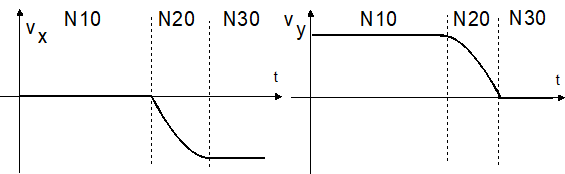
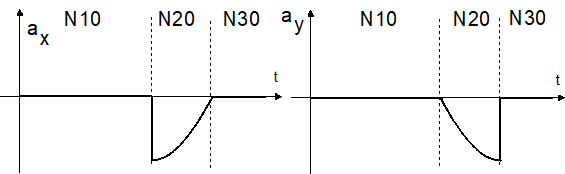
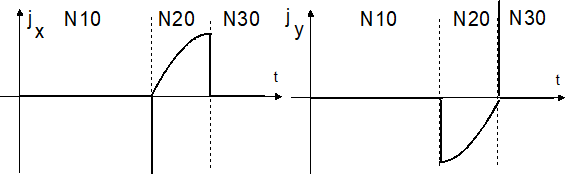
Description | At the block transition from linear to circular block or vice versa, a jump in acceleration occurs, even if there is a tangential transition. The parameter weights the permissible jerk at these types of movement transitions. Jerk is only considered if P-CHAN-00009 is set. If P-AXIS-00154 is not set in the parameter list, the velocity is reduced to such an extent that the permissible jerk at the block transition is maintained. | |
Parameter | getriebe[i].dynamik.r_trans_weight | |
Data type | UNS32 | |
Data range | 0 = r_trans_weight = 1000 | |
Axis types | T, R, S | |
Dimension | T: 0.1% | R,S: 0.1% |
Default value | 1000 | |
Drive types | ---- | |
Remarks | This parameter is only considered if the non-linear slope is used and for circular - linear, circular - circular or linear - circular transitions. To define the slope type, see
| |
The permissible jerk at such movement transition types is weighted.


 | By default jerk is not considered at block transition. If jerk is to be considered at block transition, it must first be enabled in the channel parameter P-CHAN-00009 (corr_v_trans_jerk). |
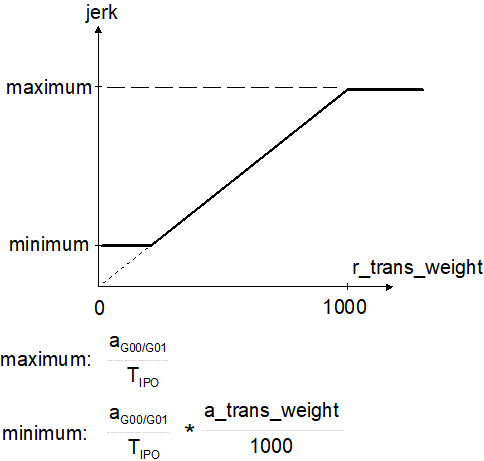
The permissible jerk at block transition results from the active acceleration depending on the block type (G0, G1), and associated ramp time tr:
(a_aktiv /tr_aktiv)* r_trans_weight / 1000.
| The minimum value is defined by the weighting of the maximum acceleration at block transition P-AXIS-00013 (a_trans_weight). If the setting is not to be limited, this can be set to 1 using channel parameter P-CHAN-00117 (mode_trans_jerk). |
If set to 1000 the parameter has no influence. The result is that no speed reduction at block transition because of jerk will occur. Smaller value than 1000 leads to reduction of velocity because of jerk at block transition. Value 0 leads to velocity reduction depending on jerk setting of the non-linear slope (see parameter P-AXIS-00024).