Axes | Axis 1 | Enc
Encoder
Encoders generally record a physical quantity and provide parameters for e.g. scaling. In most cases, a position is read in and processed here, and velocity, acceleration and jerk are determined by derivation from the position.
Since actual values often fluctuate strongly, a filter is also available for each individual variable.
A wide variety of encoders versions is supported. Both absolute and incremental encoders are available. Furthermore, there are simulation encoders, as well as special encoders for force determination, for example.
If you use an encoder axis, you can also use it to read in a different physical quantity and use the existing parameters for scaling, for example.
The encoder parameters include the scaling, zero offset shift and the modulo factor. There are also encoder parameters for software end positions as well as for homing.
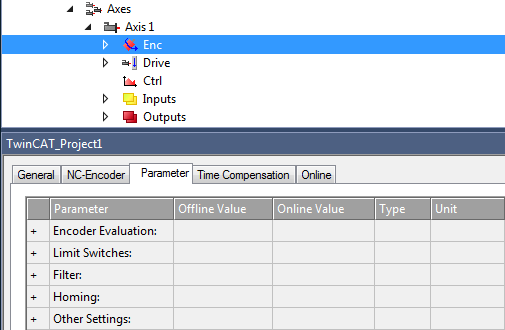
Under "MOTION | NC-Task 1 SAF | Axes | Axis 1 | Enc" the Parameter tab shows the parameter groups
- Encoder Evaluation,
- Limit Switches,
- Filter,
- Homing,
- Other Settings.