SAF task
The block execution task (SAF task) directly executes commands that do not require preprocessing or have been prepared by the SVB task and handles cyclic communication with the drive devices.
- motion commands of the Tc2_MC2 library, like MC_MoveAbsolute, MC_MoveRelative, MC_MoveVeloctiy etc.
- coupling axes
- cyclic setpoint generation for all axes and output to drives
- cyclic acquisition of the actual position and position control, if not directly controlled by the drive
- I/O communication, e.g. for the evaluation of latch positions
Task tab
The SAF task is configured via the NC/PTP NCI Configuration node below the MOTION node, which is called NC-Task 1 SAF by default. Details about the task dialog, see TE1000 | The TwinCAT Project.
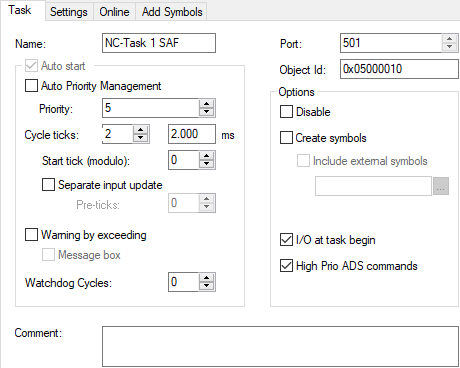
High Prio ADS commands
As of TwinCAT 3.1 Build 4026, ADS communication takes place at the start of an SAF task cycle by default. This corresponds to a higher prioritization of ADS communication.
Up to and including TwinCAT 3.1 Build 4024, ADS communication takes place at the end of an SAF task cycle. By unchecking High Prio ADS commands, ADS communication also takes place on a TwinCAT 3.1 Build 4026 system at the end of an SAF task cycle.
Settings tab
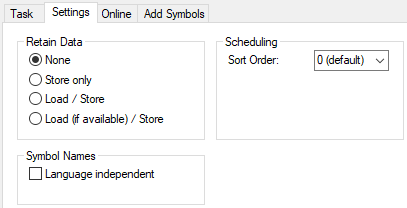
Retain data
TwinCAT NC uses retain data to be able to restore the position of individual axes with absolute measured value system at TwinCAT system start (from Config Mode to Run Mode). The Retain setting defines globally whether the necessary data is saved at TwinCAT system stop (from Run Mode to Config Mode) and loaded at TwinCAT system start. In addition, saving must be parameterized for each axis that requires such data (see Data Persistence).
Notice | |
Prevent data loss If retain data is used, it is recommended that the system is backed up with a UPS so that the data can be stored safely even if the supply voltage fails. |
- None: No retain data is saved or loaded.
- Store only: No retain data is loaded at TwinCAT system start. Retain data is saved when the TwinCAT system is stopped. This setting is only used for compatibility with old configurations.
- Load/Store: Retain data is saved at TwinCAT system stop and loaded at TwinCAT system start. If no or only corrupt data is available at TwinCAT system start, the TwinCAT system aborts the start process with an error.
The TwinCAT system cannot be started in this mode when the retain data is configured for the first time, so the Load (if available)/Store mode should first be set and then reset to Load/Store after a successful system start. - Load (if available)/Store: Retain data is saved at TwinCAT system stop and loaded at TwinCAT system start. If no or only corrupt data is available at TwinCAT system start, the system starts without retain data.
Axes that are dependent on retain data are in the "not referenced" state. The application should check this state and initiate measures.
Scheduling
The sort order is used to prioritize the TwinCAT NC (e.g., setpoint generation) within the NC SAF task. This setting is important if the NC SAF task executes other modules in addition to the TwinCAT NC. Further details on the execution sequence of a task can be found in the TwinCAT C++ documentation, including an example.
Symbol Names
The setting Symbol Names, Language independent specifies that the generic part of the symbol name is not changed. This is then always held in English.
For example, without this setting Axes.Axis 1.SetPos would change to Achsen.Axis 1.SetPos when switching language from English to German, while with the setting it would remain English.
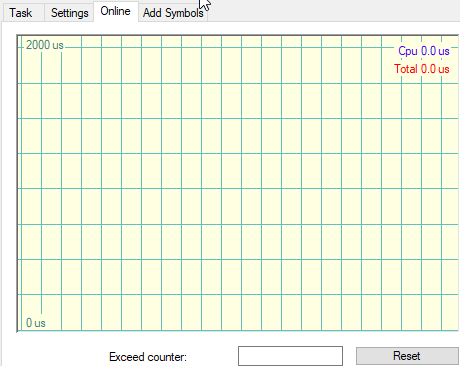
Online tab
The Online tab shows the utilization of the task over time and indicates the number of cycle time overruns. Details can be found in the TE1000 | TwinCAT 3 XAE documentation.