PML_UnitModeManager
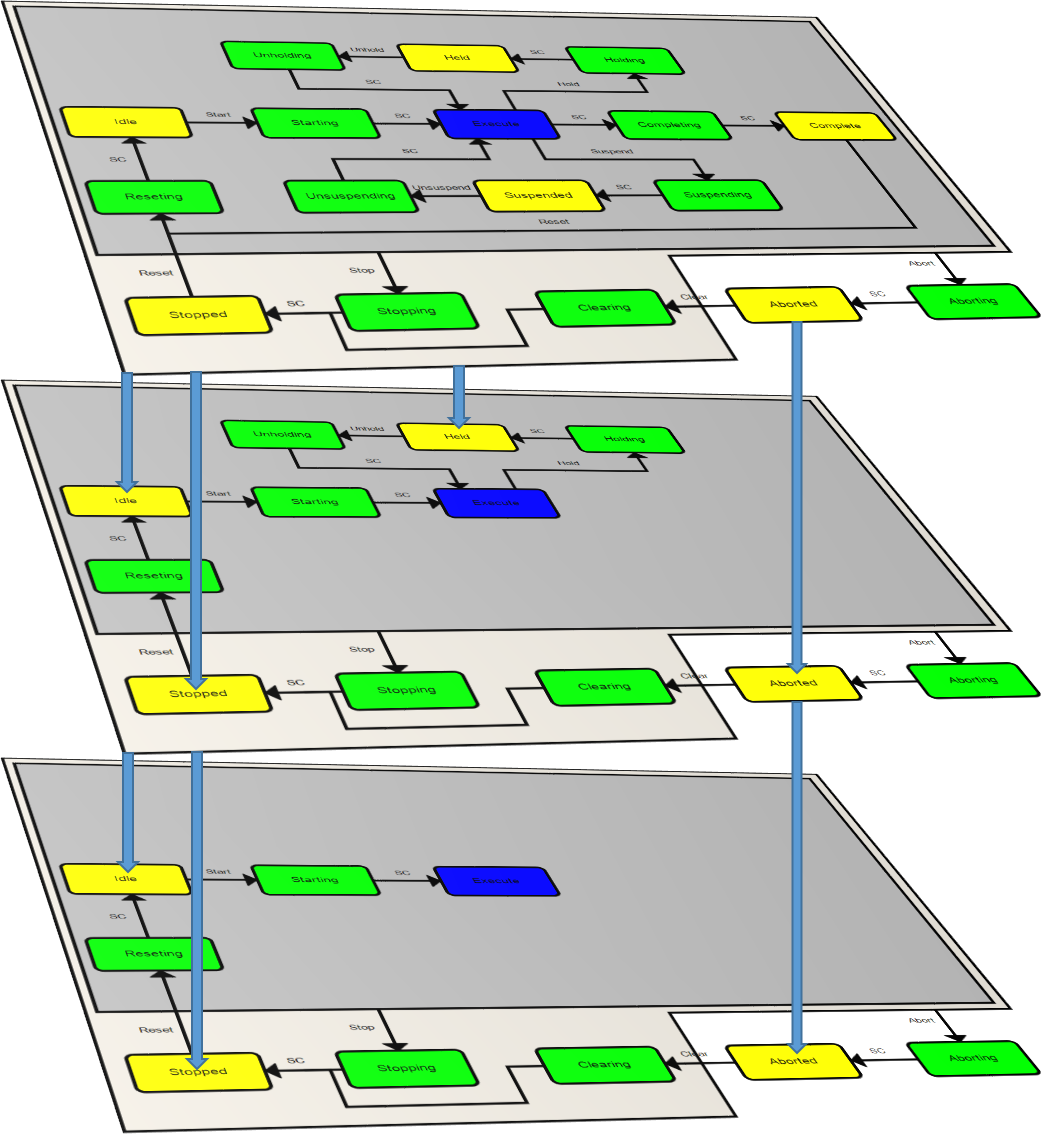
Machines have other system modes apart from “Production”. Each unit mode is defined by its own state model. A "Mode Manager" must be defined for transitions between the modes. The “Mode Manager” decides how and in which state a machine can change unit modes; i.e. built-in barriers prevent the machine from changing to unsuitable states. These barriers are permanently defined for the “Production”, “Maintenance” and “Manual” base modes, as the illustration below shows. This can be individually specified for other modes defined via the PML_UnitModeConfig function block.
| |
Adhere to proper mode changes The logic for transitions between the modes depends on the application, especially for transitions between "Manual" and "Production" mode. In addition, hardware barriers or safety equipment may be necessary for such mode changes. The responsibility for proper mode changes lies with whoever implements them. |

 Inputs
Inputs
VAR_INPUT
bExecute : BOOL;
eModeCommand : DINT;
ePMLState : E_PMLState;
END_VARName | Type | Description |
|---|---|---|
bExecute | BOOL | Mode change on rising edge |
eModeCommand | DINT | Requested mode |
ePMLState | E_PMLState | Enumeration that delivers the current PML state of the automatic state machine. |
 Outputs
Outputs
VAR_OUTPUT
eModeStatus : DINT;
sModeStatus : STRING;
bDone : BOOL;
bError : BOOL;
bErrorID : UDINT;
END_VARName | Type | Description |
|---|---|---|
eModeStatus | DINT | Current PML UnitMode |
sModeStatus | STRING | Name of the current PML UnitMode |
bDone | BOOL | Becomes TRUE as soon as the mode change has been successfully carried out. |
bError | BOOL | Becomes TRUE as soon as an error occurs. |
nErrorID | UDINT | Supplies the error number when the bError output is set. |
Requirements
Development environment | Target system type | PLC library to include |
|---|---|---|
TwinCAT v3.1 Build 4018 and higher | PC (i386) | Tc3_PackML_V2 |