BAC_AC_VAV_01_xx
Functional description
The template is used for controlling a volume flow controller via an analog output.
Versions
The template BAC_AC_VAV_01_xxx is available in different versions.
The volume flow controller versions are identified by means of a key. The identification key is derived from the table below.
Optionen | Forced control BO | Feedback | mechanical priority operation position feedback potentiometer | mechanical priority operation position feedback hand switch |
|---|---|---|---|---|
Instanz | Force | Fdb | FdbOut | LocSwi |
Datenpunkt Typ |
| AI | AI | BI |
| 8 | 4 | 2 | 1 |
BAC_AC_VAV_01_000 | 0 | 0 | 0 | 0 |
BAC_AC_VAV_01_003 | 0 | 0 | 1 | 1 |
BAC_AC_VAV_01_004 | 0 | 1 | 0 | 0 |
BAC_AC_VAV_01_007 | 0 | 1 | 1 | 1 |
BAC_AC_VAV_01_008 | 1 | 0 | 0 | 0 |
BAC_AC_VAV_01_011 | 1 | 0 | 1 | 1 |
BAC_AC_VAV_01_012 | 1 | 1 | 0 | 0 |
BAC_AC_VAV_01_015 | 1 | 1 | 1 | 1 |
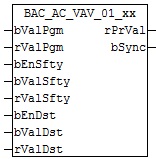
Interface
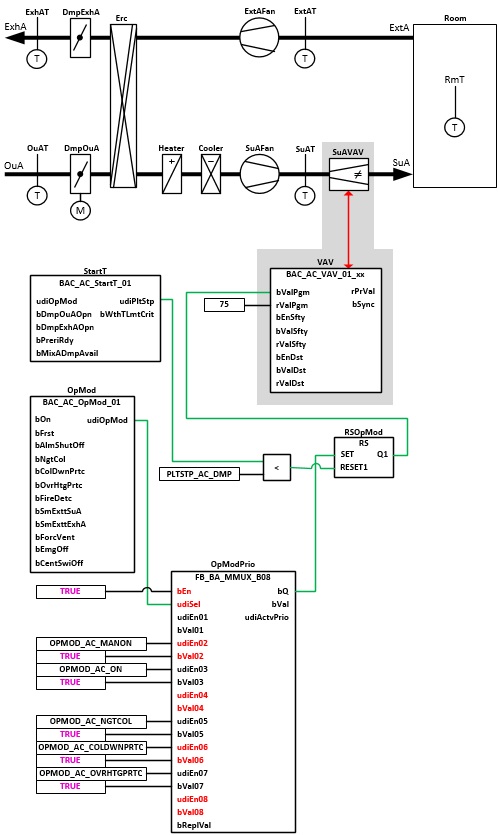
Plant diagram 01
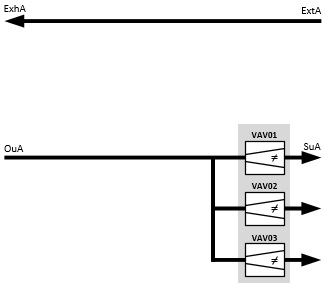
Plant diagram 02
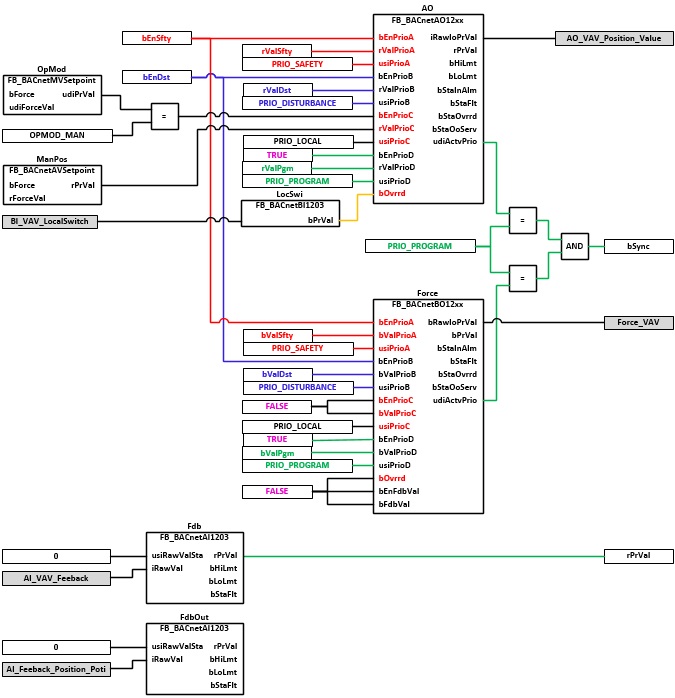
Block diagram version BAC_AC_VAV_01_15
VAR_INPUT
bValPgm : BOOL;
rValPgm : REAL;
bEnSfty : BOOL;
bValSfty : BOOL;
rValSfty : REAL;
bEnDst : BOOL;
bValDst : BOOL;
rValDst : REAL;
bValPgm: binary value program priority
rValPgm: analog value program priority
bEnSfty: safety priority enable
bValSfty: binary value safety priority
rValSfty: analog value safety priority
bEnDst: disturbance priority enable. This input can be used to connect process feedback, for example.
bValDst: binary value disturbance priority. This input can be used to connect process feedback, for example.
rValDst: analog value disturbance priority
VAR_OUTPUT
rPrVal : REAL;
bSync : BOOL;
bForce : BOOL;
rPrVal : Current position of the volume flow controller
bSync: Output of a pulse to synchronise the PID controller associated with the volume flow controller during reset from manual to automatic operation to the current valve position.
The synchronising pulse bSync should only be used if the template used contains the valve position feedback Fdb.
bForce : The volume flow is under forced control from the binary output.
VAR CONSTANT
PLT_NUM : BYTE := 1;
PLT_NUM: all alarms and events of all plant components within a controller are included in a global alarm and event list. The assignment of events and alarms to a plant is defined by the assignment of a PLT_NUM plant number.
The recording and processing of an alarm from an aggregate or a device takes place within the templates by means of the alarm function block FB_BA_Alarm.
The evaluation of the alarms of a plant, e.g. for the generation of a collective message or for plant shutdown in case of relevant faults, takes place within the template BAC_PltAlm_01 by means of the function block FB_BA_AlarmPlt.
The evaluation of different plant events within the templates of a plant, takes place within the template BAC_PltComnMsg_01 by means of the function block FB_BA_ComnMsg.
Important! The assignment and evaluation of the alarms and events of a plant can only be done correctly if all templates of a plant have the same plant number!
The plant number can be assigned in the Project Builder in the parameter menu for the templates or via a column in the Excel import.
Program description
Instance | Type | optional | Task | |||||
|---|---|---|---|---|---|---|---|---|
OpMod |
| MV object for manual control of the volume flow controller via the MCL or a local operator display | ||||||
ManPos |
| AV object for entering the control value for the volume flow controller with manual override | ||||||
Fdb | X | AI object for logging the position feedback from the volume flow controller | ||||||
FdbOut | X | AI object for logging the mechanical priority operation position feedback potentiometer | ||||||
LocSwi | X | BI object for logging the mechanical priority operation feedback hand switch | ||||||
AO |
| AO object for controlling the volume flow controller | ||||||
Priority: | Enable | Value | Comment | |||||
PRIO_SAFETY (1) | Input bEnSfty | Input rValSfty |
| |||||
PRIO_DISTURBANCE (3) | Input bEnDst | Input rValDst |
| |||||
PRIO_LOCAL (8) | OpMod_udiPrVal = OPMOD_MAN | ManPos_rPrVal | In manual mode, value of AV object ManPos | |||||
PRIO_PROGRAM (15) | TRUE | Input rValPgm | Value of input rValPgm (e.g. from a controller) | |||||
BO | X | BO object for forced control of the volume flow controller | ||||||
Priority: | Enable | Value | ||||||
PRIO_SAFETY (1) | Input bEnSfty | Input bValSfty | ||||||
PRIO_DISTURBANCE (3) | Input bEnDst | Input bValDst | ||||||
PRIO_LOCAL (8) |
|
| ||||||
PRIO_PROGRAM (15) | TRUE | Input bValPgm | ||||||
| EQ, EQ, AND |
| Value of the network is TRUE, if the active priority is PRIO_PROGRAM (15). Can be used for synchronizing the controller on return to automatic mode | |||||
TLogAO |
| Logs the present value of the AO object | ||||||
IO linking
Variables for linking with the terminals
Parameter | Type | optional | Process image |
|
|---|---|---|---|---|
AO | INT | X | Output | Analog output control value volume flow controller |
AO_State | USINT | X | Input | Status byte analog output |
AI_Feedback | INT | X | Input | Analog input position feedback |
AI_Feedback_State | USINT | X | Input | Analog input position feedback status byte |
BO_Force | BOOL | X | Output | Digital output forced control |
AI_Feeback_Poti | INT | X | Input | Analog input - manual potentiometer – feedback - control value |
BI_LocalSwitch | BOOL | X | Input | Digital input – switch manual pump - message - manual/auto |
Version history
Version number | Comments |
|---|---|
1.0.0 |
|