Notes to Commissioning
Software functions can be accessed via TwinCAT on the basis of the EtherCAT protocol. The process data objects (PDOs) provide access to the module's important data outputs. Further settings and information can be read or written in places via CANopen over EtherCAT (CoE).
AC operation
The terminal handles the communication for an AC charging process between it (or the charging station function implemented in the customer application, Electrical Vehicle Supply Equipment (EVSE)) and an electrical vehicle (EV) via PWM communication in accordance with IEC 61851 and high-level communication in accordance with ISO 15118.
DC operation
The terminal handles the communication for a DC charging process between it (or the charging station function implemented in the customer application, Electrical Vehicle Supply Equipment (EVSE)) and an electrical vehicle (EV) via PWM communication in accordance with IEC 61851 and high-level communication in accordance with ISO 15118.
Plug Type setting
This setting option can be used in the application to select which type of charging configuration is used: Type 1 or Type 2.
High/low-level communication
The PDO setting can be used to set the representation of the communication levels between high and low level or direct current (DC) and alternating current (AC) charging:
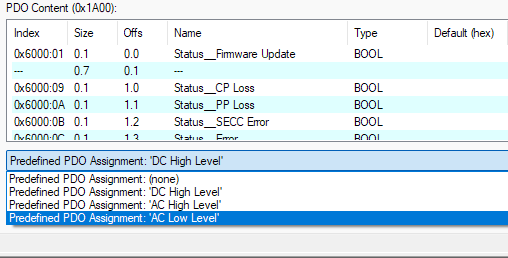 Fig.86: Predefined PDO
Fig.86: Predefined PDOBehavior in the event of PP/CP loss
The amplitude of the pilot signal CP (Control Pilot) and the Proximity Pilot (PP) is evaluated. As the CP/PP-Loss functions are largely implemented in hardware, state transitions and error states (e.g. wire break) in the charging process can be detected and signaled very quickly.
You can use the CP/PP-Loss functions to comply with the switch-off times required by the standards. To do this, make sure that the power flow is interrupted within the standardized switch-off times after the CP/PP-Loss signals are triggered and that the charging line is de-energized (see IEC 61851-23).
Example circuit EL6761
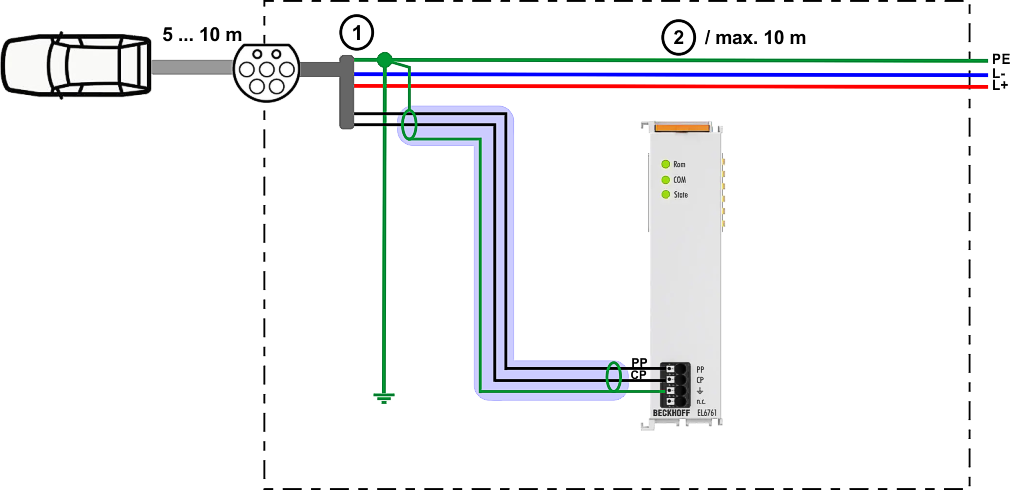 Fig.87: Example circuit EL6761
Fig.87: Example circuit EL6761Point 1 - common grounding
Point 2 - the shielded power for forwarding the CP signal should not be longer than 15 m, as the total line is limited by standards to 30 m. The remaining length can be used for the cable to the EV.
The EL6761 terminal is intended exclusively for providing communication between it (or the charging station function implemented in the customer application, EVSE) and an EV. Many other functions are missing for a charging station function, such as the provision of power electronics to ensure the desired energy transfer.
Notice | |
EtherCAT cycle time For optimum diagnostics, the additional diagnostic PDOs should be collected with a cycle time of 1 ms. |
Cable Type CoE parameters
| Type1 | Type2 |
|---|---|---|
DC | PP detection mandatory (CCS1) in accordance with SAE J1772 -> Parameter is ignored and PP detection is executed | No PP detection (IEC 61851) -> Parameter is ignored and PP detection is not executed |
AC | Type 1 cable with AC permanently connected: PP detection optional according to SAE J1772 -> depends on the configuration whether PP is recognized or not | Permanently connected cable: No PP detection (IEC 61851) (Maximum current of the cable should be known to the host controller, which sends the maximum current) -> Parameter must be set to PP detection "off" ___________________________________ Loose cable: PP detection to determine the coding resistance in the cable for the maximum current of the cable (IEC 61851) -> Parameter must be set to PP detection "on" |
CP-Loss is saving
- Is evaluated in state C or D and output as an error if necessary
- CP must be unplugged and go through state B again, then the error is cleared
 | Authentication phase and PreCharge phase The following must be observed: |
| Parameter setting only in "PreOP" mode Please note the following: |