Example 1
In the first example, basic communication between EVSE and EV is implemented on the basis of IEC 61851 low-level communication using the EL6761 EtherCAT Terminal.
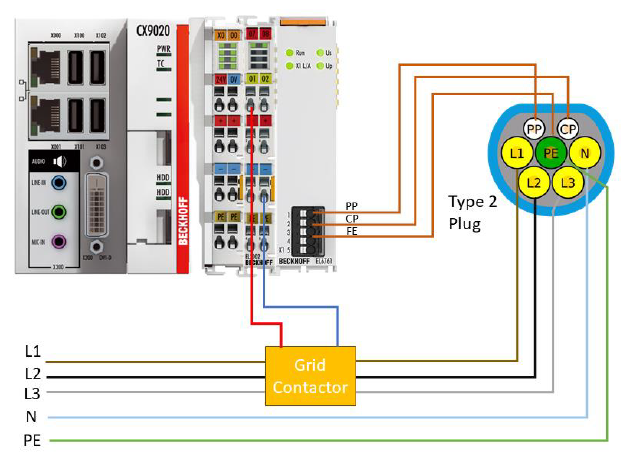 Fig.88: Exemplary setup: the structure is simplified with regard to safety features such as residual current protection.
Fig.88: Exemplary setup: the structure is simplified with regard to safety features such as residual current protection.To use the terminal for low-level communication, the predefined PDO setting "AC Low Level" is selected in TwinCAT.
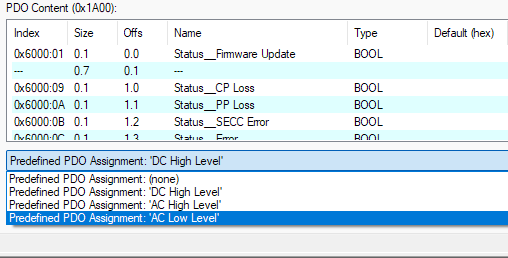 Fig.86: Predefined PDO "AC Low Level"
Fig.86: Predefined PDO "AC Low Level"In addition, the terminal is configured via CoE Index 8000 (SECC settings) as shown in the "Index 8000 settings" figure.
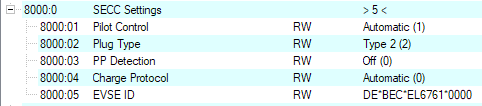 Fig.90: Index 8000 settings
Fig.90: Index 8000 settingsTo establish communication in TwinCAT, a state machine realized by switch-case determination handles the states of the Control Pilot State input PDO. The resulting state diagram is shown in Figure "State sequence of the Pilot State Machine".
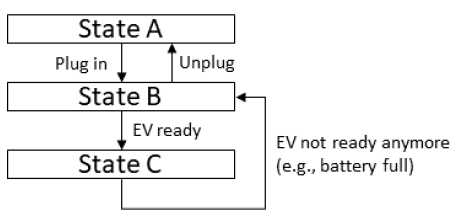 Fig.91: State sequence of the Pilot State Machine
Fig.91: State sequence of the Pilot State MachineAs soon as the terminal is connected to the EV, it changes the PDO from state A to state B, as shown above. As soon as the connection has been successfully established and the vehicle is ready for charging (state machine changes to state C), the mains contactor can be switched on and the charging process can be started. Once the battery is fully charged, the state changes back to B.