ONLINE configuration creation
Detecting/scanning of the EtherCAT device
The online device search can be used if the TwinCAT system is in CONFIG mode. This can be indicated by a symbol right below in the information bar:
- on TwinCAT 2 by a blue display “Config Mode” within the System Manager window:
 .
. - on TwinCAT 3 within the user interface of the development environment by a symbol
 .
.
TwinCAT can be set into this mode:
- TwinCAT 2: by selection of
 in the Menubar or by “Actions” → “Set/Reset TwinCAT to Config Mode…”
in the Menubar or by “Actions” → “Set/Reset TwinCAT to Config Mode…” - TwinCAT 3: by selection of in the Menubar or by “TwinCAT” → “Restart TwinCAT (Config Mode)”
 | Online scanning in Config mode The online search is not available in RUN mode (production operation). Note the differentiation between TwinCAT programming system and TwinCAT target system. |
The TwinCAT 2 icon () or TwinCAT 3 icon () within the Windows-Taskbar always shows the TwinCAT mode of the local IPC. Compared to that, the System Manager window of TwinCAT 2 or the user interface of TwinCAT 3 indicates the state of the target system.

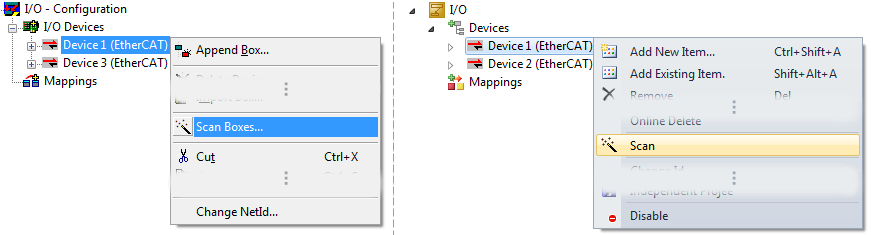
Right-clicking on “I/O Devices” in the configuration tree opens the search dialog.
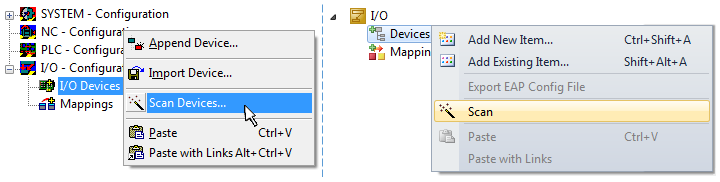
This scan mode attempts to find not only EtherCAT devices (or Ethernet ports that are usable as such), but also NOVRAM, fieldbus cards, SMB etc. However, not all devices can be found automatically.

Ethernet ports with installed TwinCAT real-time driver are shown as “RT Ethernet” devices. An EtherCAT frame is sent to these ports for testing purposes. If the scan agent detects from the response that an EtherCAT slave is connected, the port is immediately shown as an “EtherCAT Device” .
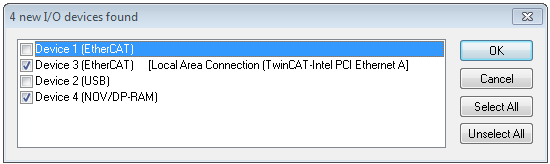
Via respective checkboxes devices can be selected (as illustrated in Fig. “Detected Ethernet devices” e.g. Device 3 and Device 4 were chosen). After confirmation with “OK” a device scan is suggested for all selected devices, see Fig.: “Scan query after automatic creation of an EtherCAT device”.
| Selecting the Ethernet port Ethernet ports can only be selected for EtherCAT devices for which the TwinCAT real-time driver is installed. This has to be done separately for each port. Please refer to the respective installation page. |
Detecting/Scanning the EtherCAT devices
| Online scan functionality During a scan the master queries the identity information of the EtherCAT slaves from the slave EEPROM. The name and revision are used for determining the type. The respective devices are located in the stored ESI data and integrated in the configuration tree in the default state defined there. |
Notice | |
Slave scanning in practice in series machine production The scanning function should be used with care. It is a practical and fast tool for creating an initial configuration as a basis for commissioning. In series machine production or reproduction of the plant, however, the function should no longer be used for the creation of the configuration, but if necessary for comparison with the defined initial configuration.Background: since Beckhoff occasionally increases the revision version of the delivered products for product maintenance reasons, a configuration can be created by such a scan which (with an identical machine construction) is identical according to the device list; however, the respective device revision may differ from the initial configuration. |
Example:
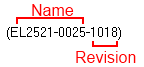
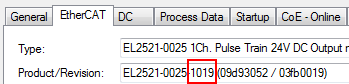
Company A builds the prototype of a machine B, which is to be produced in series later on. To do this the prototype is built, a scan of the IO devices is performed in TwinCAT and the initial configuration “B.tsm” is created. The EL2521-0025 EtherCAT terminal with the revision 1018 is located somewhere. It is thus built into the TwinCAT configuration in this way:
Likewise, during the prototype test phase, the functions and properties of this terminal are tested by the programmers/commissioning engineers and used if necessary, i.e. addressed from the PLC “B.pro” or the NC. (the same applies correspondingly to the TwinCAT 3 solution files).
The prototype development is now completed and series production of machine B starts, for which Beckhoff continues to supply the EL2521-0025-0018. If the commissioning engineers of the series machine production department always carry out a scan, a B configuration with the identical contents results again for each machine. Likewise, A might create spare parts stores worldwide for the coming series-produced machines with EL2521-0025-1018 terminals.
After some time Beckhoff extends the EL2521-0025 by a new feature C. Therefore the FW is changed, outwardly recognizable by a higher FW version and a new revision -1019. Nevertheless the new device naturally supports functions and interfaces of the predecessor version(s); an adaptation of “B.tsm” or even “B.pro” is therefore unnecessary. The series-produced machines can continue to be built with “B.tsm” and “B.pro”; it makes sense to perform a comparative scan against the initial configuration “B.tsm” in order to check the built machine.
However, if the series machine production department now doesn’t use “B.tsm”, but instead carries out a scan to create the productive configuration, the revision -1019 is automatically detected and built into the configuration:
This is usually not noticed by the commissioning engineers. TwinCAT cannot signal anything either, since a new configuration is essentially created. According to the compatibility rule, however, this means that no EL2521-0025-1018 should be built into this machine as a spare part (even if this nevertheless works in the vast majority of cases).
In addition, it could be the case that, due to the development accompanying production in company A, the new feature C of the EL2521-0025-1019 (for example, an improved analog filter or an additional process data for the diagnosis) is discovered and used without in-house consultation. The previous stock of spare part devices are then no longer to be used for the new configuration “B2.tsm” created in this way. Þ if series machine production is established, the scan should only be performed for informative purposes for comparison with a defined initial configuration. Changes are to be made with care!
If an EtherCAT device was created in the configuration (manually or through a scan), the I/O field can be scanned for devices/slaves.

In the System Manager (TwinCAT 2) or the User Interface (TwinCAT 3) the scan process can be monitored via the progress bar at the bottom in the status bar.

The configuration is established and can then be switched to online state (OPERATIONAL).

In Config/FreeRun mode the System Manager display alternates between blue and red, and the EtherCAT device continues to operate with the idling cycle time of 4 ms (default setting), even without active task (NC, PLC).


The EtherCAT system should then be in a functional cyclic state, as shown in Fig. Online display example.
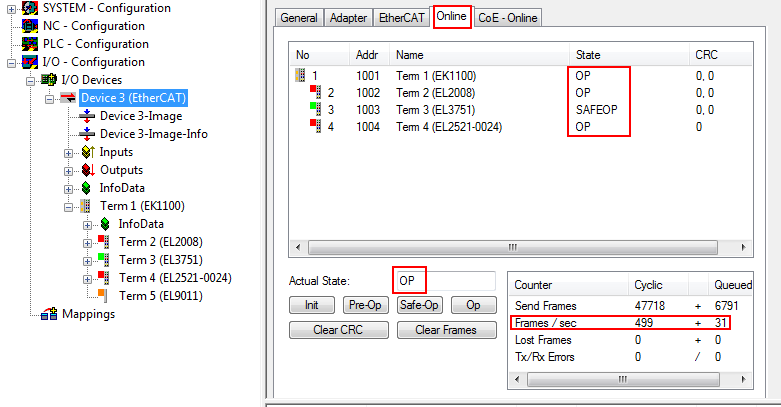
Please note:
- all slaves should be in OP state
- the EtherCAT master should be in “Actual State” OP
- “frames/sec” should match the cycle time taking into account the sent number of frames
- no excessive “LostFrames” or CRC errors should occur
The configuration is now complete. It can be modified as described under manual procedure.
Troubleshooting
Various effects may occur during scanning.
- An unknown device is detected, i.e. an EtherCAT slave for which no ESI XML description is available.
In this case the System Manager offers to read any ESI that may be stored in the device. This case is described in the chapter “Notes regarding ESI device description”. - Device are not detected properly
Possible reasons include: - faulty data links, resulting in data loss during the scan
- slave has invalid device description
- The connections and devices should be checked in a targeted manner, e.g. via the emergency scan.
Then re-run the scan.
In the System Manager such devices may be set up as EK0000 or unknown devices. Operation is not possible or meaningful.
Scan over existing Configuration
Notice | |
Change of the configuration after comparison With this scan (TwinCAT 2.11 or 3.1) only the device properties vendor (manufacturer), device name and revision are compared at present! A “ChangeTo” or “Copy” should only be carried out with care, taking into consideration the Beckhoff IO compatibility rule (see above). The device configuration is then replaced by the revision found; this can affect the supported process data and functions. |
If a scan is initiated for an existing configuration, the actual I/O environment may match the configuration exactly or it may differ. This enables the configuration to be compared.

If differences are detected, they are shown in the correction dialog, so that the user can modify the configuration as required.
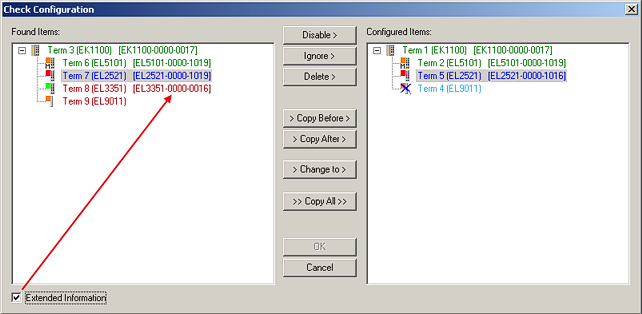
It is advisable to tick the “Extended Information” check box to reveal differences in the revision.
Color | Explanation |
|---|---|
green | This EtherCAT slave matches the entry on the other side. Both type and revision match. |
blue | This EtherCAT slave is present on the other side, but in a different revision. This other revision can have other default values for the process data as well as other/additional functions. If the found revision is lower than the configured revision, it is likely that the slave cannot be used. The found device may not support all functions that the master expects based on the higher revision number. |
light blue | This EtherCAT slave is ignored (“Ignore” button) |
red |
|
| Device selection based on revision, compatibility The ESI description also defines the process image, the communication type between master and slave/device and the device functions, if applicable. The physical device (firmware, if available) has to support the communication queries/settings of the master. This is backward compatible, i.e. newer devices (higher revision) should be supported if the EtherCAT master addresses them as an older revision. The following compatibility rule of thumb is to be assumed for Beckhoff EtherCAT Terminals/ Boxes/ EJ-modules: device revision in the system >= device revision in the configuration This also enables subsequent replacement of devices without changing the configuration (different specifications are possible for drives). |
Example
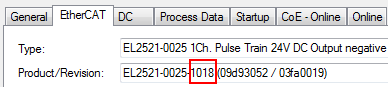
If an EL2521-0025-1018 is specified in the configuration, an EL2521-0025-1018 or higher (-1019, -1020) can be used in practice.
If current ESI descriptions are available in the TwinCAT system, the last revision offered in the selection dialog matches the Beckhoff state of production. It is recommended to use the last device revision when creating a new configuration, if current Beckhoff devices are used in the real application. Older revisions should only be used if older devices from stock are to be used in the application.
In this case the process image of the device is shown in the configuration tree and can be parameterized as follows: linking with the task, CoE/DC settings, plug-in definition, startup settings, ...
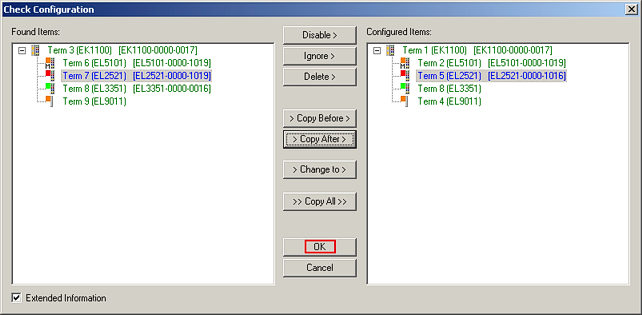
Once all modifications have been saved or accepted, click “OK” to transfer them to the real *.tsm configuration.
Change to Compatible Type
TwinCAT offers a function Change to Compatible Type… for the exchange of a device whilst retaining the links in the task.
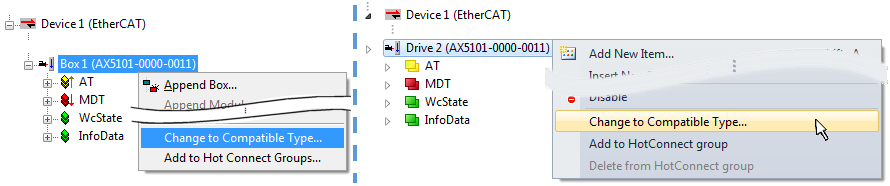
The following elements in the ESI of an EtherCAT device are compared by TwinCAT and assumed to be the same in order to decide whether a device is indicated as "compatible":
- Physics (e.g. RJ45, Ebus...)
- FMMU (additional ones are allowed)
- SyncManager (SM, additional ones are allowed)
- EoE (attributes MAC, IP)
- CoE (attributes SdoInfo, PdoAssign, PdoConfig, PdoUpload, CompleteAccess)
- FoE
- PDO (process data: Sequence, SyncUnit SU, SyncManager SM, EntryCount, Ent-ry.Datatype)
This function is preferably to be used on AX5000 devices.
Change to Alternative Type
The TwinCAT System Manager offers a function for the exchange of a device: Change to Alternative Type
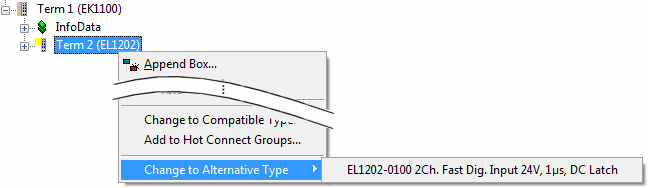
If called, the System Manager searches in the procured device ESI (in this example: EL1202-0000) for details of compatible devices contained there. The configuration is changed and the ESI-EEPROM is overwritten at the same time – therefore this process is possible only in the online state (ConfigMode).