OFFLINE configuration creation
Creating the EtherCAT device
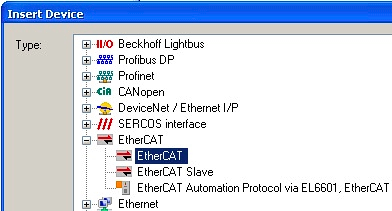
Create an EtherCAT device in an empty System Manager window.
Select type “EtherCAT” for an EtherCAT I/O application with EtherCAT slaves. For the present publisher/subscriber service in combination with an EL6601/EL6614 terminal select “EtherCAT Automation Protocol via EL6601”.
Then assign a real Ethernet port to this virtual device in the runtime system.
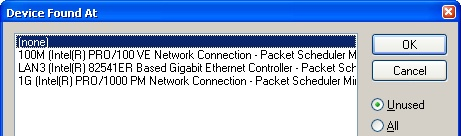
This query may appear automatically when the EtherCAT device is created, or the assignment can be set/modified later in the properties dialog; see Fig. “EtherCAT device properties (TwinCAT 2)”.
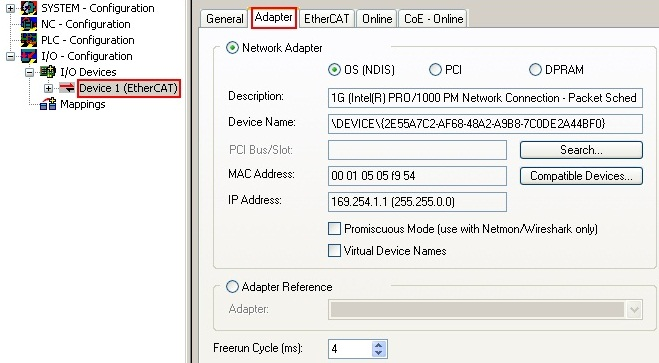
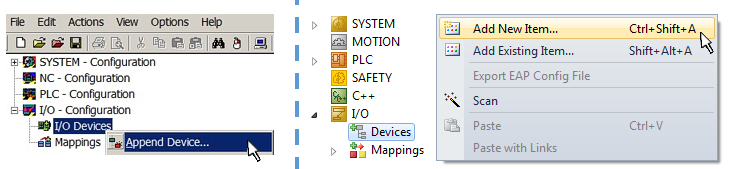
TwinCAT 3: the properties of the EtherCAT device can be opened by double click on “Device .. (EtherCAT)” within the Solution Explorer under “I/O”:
 | Selecting the Ethernet port Ethernet ports can only be selected for EtherCAT devices for which the TwinCAT real-time driver is installed. This has to be done separately for each port. Please refer to the respective installation page. |
Defining EtherCAT slaves
Further devices can be appended by right-clicking on a device in the configuration tree.

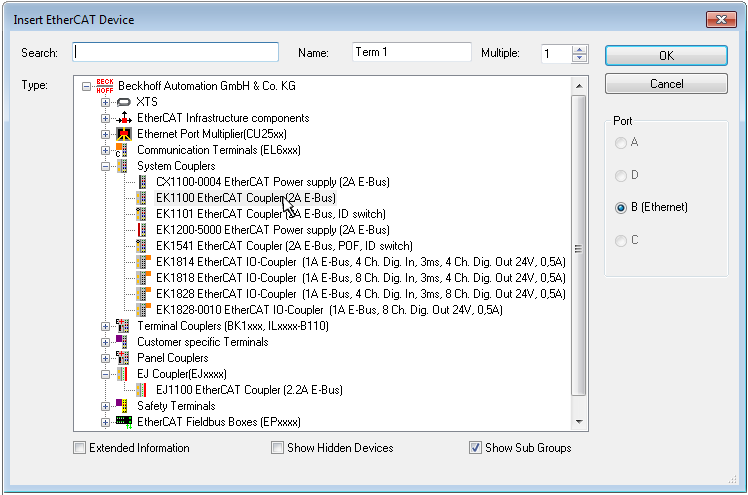
The dialog for selecting a new device opens. Only devices for which ESI files are available are displayed.
Only devices are offered for selection that can be appended to the previously selected device. Therefore, the physical layer available for this port is also displayed (Fig. “Selection dialog for new EtherCAT device”, A). In the case of cable-based Fast-Ethernet physical layer with PHY transfer, then also only cable-based devices are available, as shown in Fig. “Selection dialog for new EtherCAT device”. If the preceding device has several free ports (e.g. EK1122 or EK1100), the required port can be selected on the right-hand side (A).
Overview of physical layer
- “Ethernet”: cable-based 100BASE-TX: couplers, box modules, devices with RJ45/M8/M12 connector
- “E-Bus”: LVDS “terminal bus”, EtherCAT plug-in modules (EJ), EtherCAT terminals (EL/ES), various modular modules
The search field facilitates finding specific devices (since TwinCAT 2.11 or TwinCAT 3).
By default, only the name/device type is used as selection criterion. For selecting a specific revision of the device, the revision can be displayed as “Extended Information”.
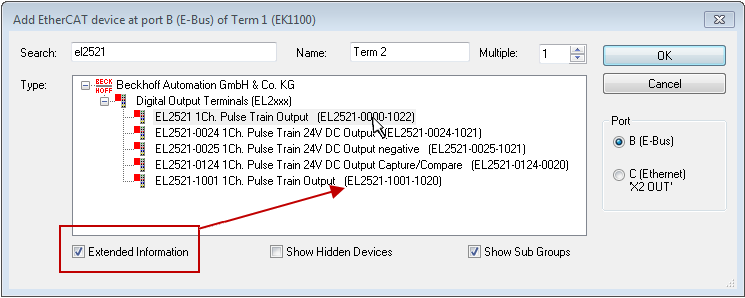
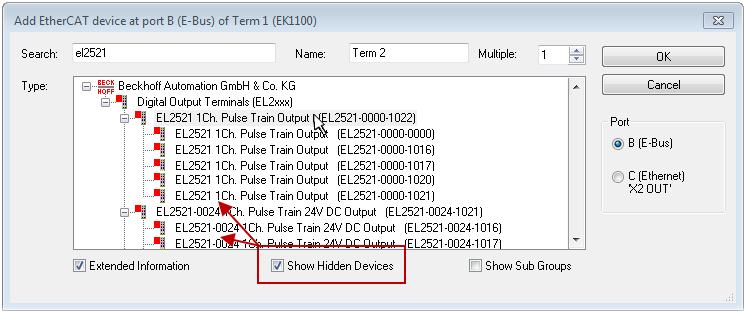
In many cases several device revisions were created for historic or functional reasons, e.g. through technological advancement. For simplification purposes (see Fig. “Selection dialog for new EtherCAT device”) only the last (i.e. highest) revision and therefore the latest state of production is displayed in the selection dialog for Beckhoff devices. To show all device revisions available in the system as ESI descriptions tick the “Show Hidden Devices” check box, see Fig. “Display of previous revisions”.
| Device selection based on revision, compatibility The ESI description also defines the process image, the communication type between master and slave/device and the device functions, if applicable. The physical device (firmware, if available) has to support the communication queries/settings of the master. This is backward compatible, i.e. newer devices (higher revision) should be supported if the EtherCAT master addresses them as an older revision. The following compatibility rule of thumb is to be assumed for Beckhoff EtherCAT Terminals/ Boxes/ EJ-modules: device revision in the system >= device revision in the configuration This also enables subsequent replacement of devices without changing the configuration (different specifications are possible for drives). |
Example
If an EL2521-0025-1018 is specified in the configuration, an EL2521-0025-1018 or higher (-1019, -1020) can be used in practice.
If current ESI descriptions are available in the TwinCAT system, the last revision offered in the selection dialog matches the Beckhoff state of production. It is recommended to use the last device revision when creating a new configuration, if current Beckhoff devices are used in the real application. Older revisions should only be used if older devices from stock are to be used in the application.
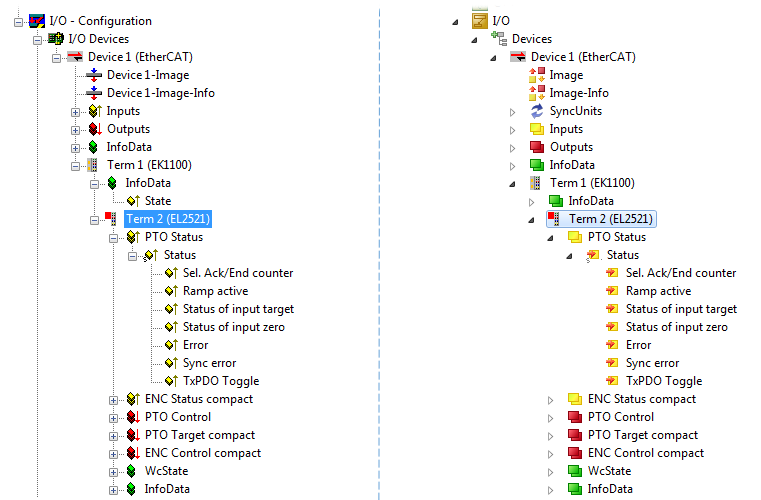
In this case the process image of the device is shown in the configuration tree and can be parameterized as follows: linking with the task, CoE/DC settings, plug-in definition, startup settings, ...