FB_BA_PID_Sp
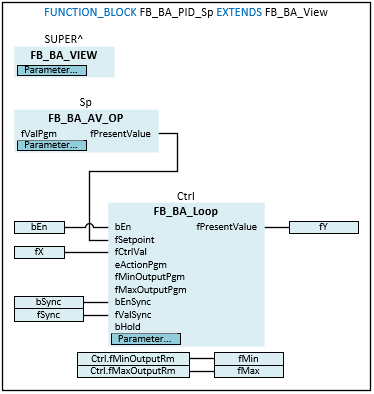
Das Template ist ein universeller PID-Regler.
Die Freigabe des PID-Reglers erfolgt anhand der Eingangsvariable bEn.
Der Sollwert wird über das AV-Objekt Sp eingegeben.
 | Die Initialisierung des Templates erfolgt innerhalb der Methode FB_Init. |
Blockschaltbild
Syntax
FUNCTION_BLOCK FB_BA_PID EXTENDS FB_BA_View
VAR_INPUT
bEn : BOOL;
fX : REAL;
bSync : BOOL;
fSync : REAL;
END_VAR
VAR_OUTPUT
fY : REAL;
fMax : REAL;
fMin : REAL;
END_VAR
VAR_INPUT CONSTANT
Sp : FB_BA_AV_Op;
Ctrl : FB_BA_Loop;
END_VAR Eingänge
Eingänge
Name | Typ | Beschreibung |
|---|---|---|
bEn | BOOL | Allgemeine Freigabe des Templates |
fX | REAL | Istwert |
bSync | BOOL | Bei einer steigenden Flanke an diesem Eingang wird das Loop-Objekt auf den Wert von fSync aufsynchronisiert. |
fSync | REAL | Synchronisationswert |
 Ausgänge
Ausgänge
Name | Typ | Beschreibung |
|---|---|---|
fY | REAL | Ausgabe der Stellgröße |
fMax | REAL | Maximalwert des Reglers |
fMin | REAL | Minimalwert des Reglers |