Übersicht
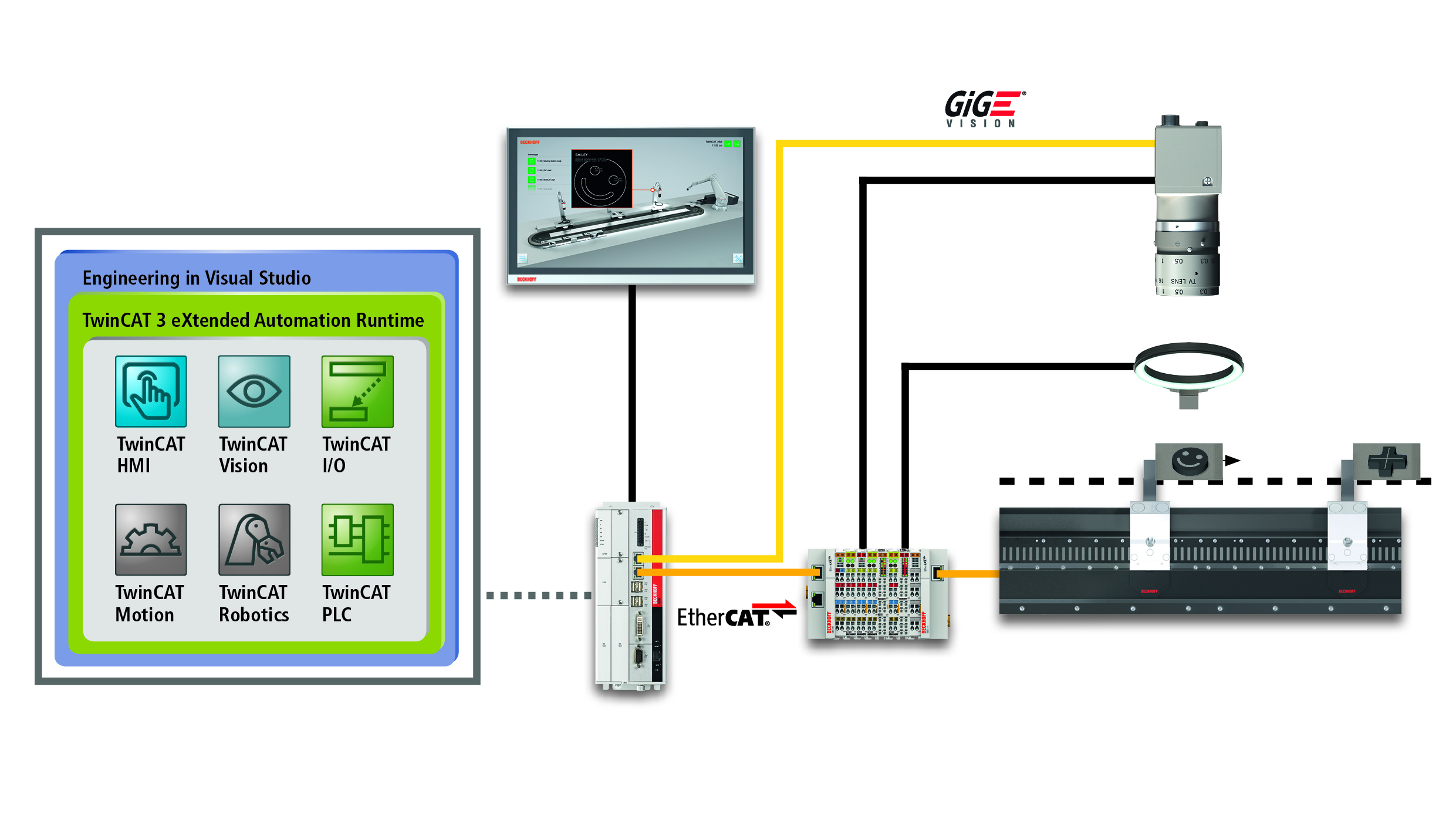
TwinCAT Vision ist eine TwinCAT 3 Function für industrielle Bildverarbeitung. Aufgaben wie die Detektion, Identifikation oder Vermessung von Objekten können direkt in der SPS in Echtzeit gelöst werden. Durch die Integration der Bildverarbeitung in die TwinCAT-Plattform sind hoch-synchronisierte Steuerungsabläufe und kürzeste Reaktionszeiten realisierbar. Die Applikationsentwicklung wird durch die Vielzahl von bereits vorhandenen TwinCAT Engineering-Tools unterstützt.
Die Programmierung von Bildverarbeitungsabläufen erfolgt in den IEC61131-3 Sprachen mit Hilfe der Tc3_Vision Bibliothek direkt im SPS-Code. Alternativ kann die Programmierung auch in TwinCAT 3 C++ erfolgen. Zwischenergebnisse können durch ein Bildanzeigetool direkt überprüft werden.
TwinCAT Vision ist Echtzeit-fähig, da die Bildverarbeitungsalgorithmen synchron zur Steuerung direkt in der TwinCAT-3-Laufzeitumgebung ausgeführt werden. Geeignete Algorithmen können zudem automatisch auf mehreren Rechenkernen parallelisiert ausgeführt werden.
Über die GigE Vision Schnittstelle können zahlreiche Industriekameras angebunden werden. Die bekannte TwinCAT-Entwicklungsumgebung wird zum Konfigurieren und Kalibrieren von Kameras sowie zur Systemeinrichtung und zum Debugging genutzt.
In den weiteren Kapiteln finden Sie ausführliche Informationen zu den Themen:
- System-Komponenten zum Verständnis des Systemaufbaus von TwinCAT Vision
- Installation für Anleitungen zur Installation und Lizenzierung
- First Steps für einen schnellen Einstieg in TwinCAT Vision
- Entwicklungsumgebung zur Konfiguration, Kalibrierung und Simulation von Kameras
- API-Referenz (Software-Dokumentation)
- Beispiele einiger Bildverarbeitungsabläufe
- Hinweise zum Troubleshooting