Beispiel „Aktiviere Planar-Part Position und verfahre Planar-Mover"
In diesem Beispiel wird ein Planar-Mover auf drei Planar-Parts verfahren, während der bewegliche der Parts verschoben wird.
Ausgangspunkt
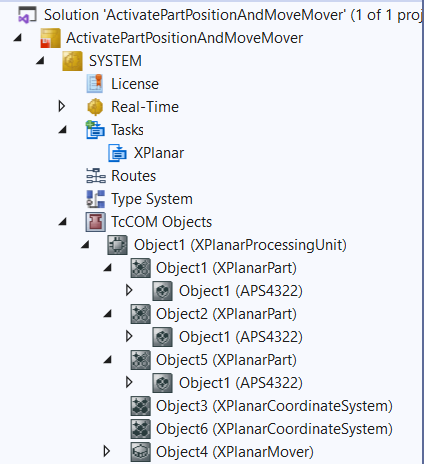
Sie starten mit einer Solution, die eine fertig konfigurierte XPlanar Processing Unit enthält. Unter der XPlanar Processing Unit sind drei Parts, zwei Koordinatensysteme und ein Mover angelegt. Unter den drei Parts ist jeweils eine Kachel angelegt.
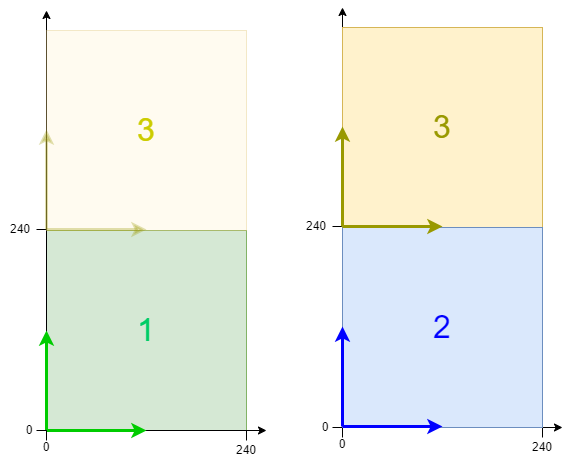
Folgende geometrische Situation ist eingestellt: die ersten beiden Parts liegen fest in den beiden Koordinatensystem im Ursprung und der dritte Part kann die Position zwischen beiden Koordinatensystemen wechseln. Es ist zum Beispiel denkbar, dass die beiden Koordinatensysteme übereinander in zwei Ebenen angeordnet sind und Part 3 ein Aufzug zwischen beiden Systemen ist. Der Mover startet in der Mitte des ersten Parts auf Koordinatensystem 1, während der dritte Part in Koordinatensystem 2 startet.
Planar-Mover und Planar-Environment anlegen
- 1. Legen Sie für dieses Beispiel einen Planar-Mover an, siehe Konfiguration.
- 2. Legen Sie eine Planar-Environment an, siehe Konfiguration.
- 3. Stellen Sie den Initialparameter XPlanar processing unit OID auf die Objekt Id der XPlanar Processing Unit. Damit ist das Part feature für alle MC Configuration Objekte aktiviert (besonders für den angelegten Planar-Mover).
PLC anlegen
- Siehe Vorabschritte PLC anlegen.
- 1. Legen Sie über MAIN den oder die Mover („MC_PlanarMover“) wie folgt an.
- Diese/r repräsentiert den/die Mover in der MC Configuration.
- 2. Legen Sie, wie nachfolgend gezeigt, einen Planar-Mover, eine Planar-Environment, einen Planar-Part, eine Zustandsvariable für eine Zustandsmaschine und eine Zielposition für die Fahrbefehle des Movers an.
PROGRAM MAIN
VAR
mover : MC_PlanarMover;
environment : MC_PlanarEnvironment;
part_three : MC_PlanarPart;
state : UDINT;
target_position : PositionXYC;
END_VAR- 3. Programmieren Sie anschließend in der MAIN einen Ablauf.
- Dieser Programmcode initialisiert Part 3, aktiviert den Mover, verschiebt Part 3 in Koordinatensystem 1, fährt den Mover auf Part 3, verschiebt den Part 3 wieder in Koordinatensystem 2 und verfährt abschließend den Mover auf Part 2 in Koordinatensystem 2.
CASE state OF
0:
part_three.Initialize(0, 16#01010080, environment);
state := 1;
1:
IF part_three.IsInitialized THEN
state := 2;
END_IF
2:
mover.Enable(0);
state := 3;
3:
IF mover.MCTOPLC.STD.State = MC_PLANAR_STATE.Enabled THEN
state := 4;
END_IF
4:
part_three.ActivatePosition(0,1);
state := 5;
5:
IF part_three.PositionIndex = 1 THEN
state := 6;
END_IF
6:
target_position.SetValuesXYCReferenceId(120, 120, 0, part_three.PartOID);
mover.MoveToPosition(0, target_position, 0, 0);
state := 7;
7:
IF mover.MCTOPLC.SET.SetPos.y > 300 AND NOT mover.MCTOPLC.STD.Busy.busyXYC THEN
state := 8;
END_IF
8:
part_three.ActivatePosition(0,2);
state := 9;
9:
IF part_three.PositionIndex = 2 THEN
state := 10;
END_IF
10:
target_position.SetValuesXYCReferenceId(120, 120, 0, 16#01010030); // Position on part two
mover.MoveToPosition(0, target_position, 0, 0);
state := 11;
END_CASEBefehl abschicken
- 4. Um den Bewegungsbefehl abzuschicken, müssen Sie den Mover nach dem END_CASE zyklisch mit seiner Update-Methode aufrufen; um die Befehle des Planar-Parts zu versenden muss die Environment zyklisch mit ihrer Update-Methode aufgerufen werden:
mover.Update();
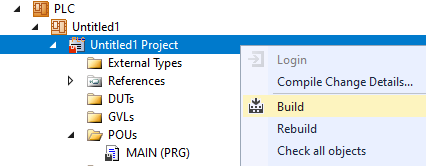
environment.Update();Durch das Bauen der PLC wird ein Symbol des „PLC-Movers" erzeugt, welches anschließend mit der Mover-Instanz im MC-Projekt verknüpft werden kann.
- 1. Verwenden Sie zum Bauen den Pfad PLC > Untitled1 > Untitled1 Project > Build.
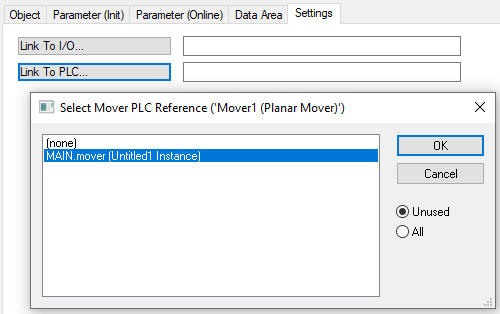
- Anschließend kann der Planar-Mover im „MC Project“ (Doppelklick) mit dem Button Link To PLC… im Reiter Settings verknüpft werden.
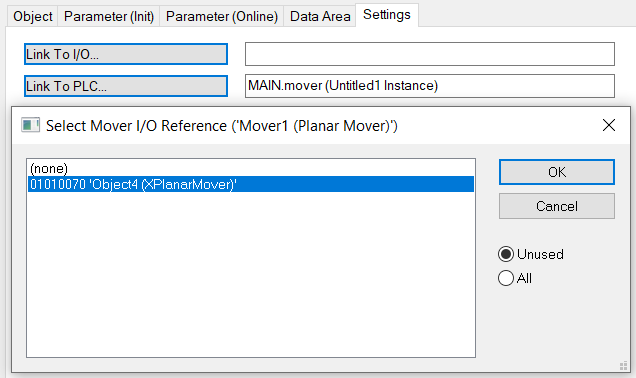
- Zusätzlich muss der Planar-Mover im „MC Project“ (Doppelklick) mit dem Button Link To I/O… im Reiter Settings verknüpft werden.
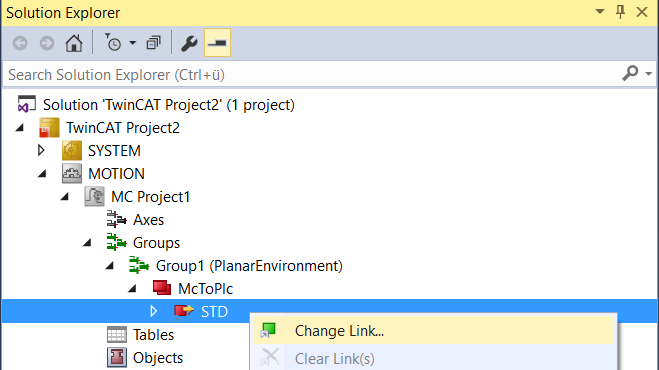
- Anschließend kann die Planar-Environment im „MC Project“ verlinkt werden.
Projekt aktivieren und starten
- 1. Aktivieren Sie die Konfiguration über den Button in der Menüleiste
 .
. - 2. Versetzen Sie das TwinCAT-System in den Zustand „Run“ über den Button
 .
. - 3. Loggen Sie die PLC über den Button in der Menüleiste ein
 .
. - 4. Starten Sie die PLC über den Play-Button in der Menüleiste.
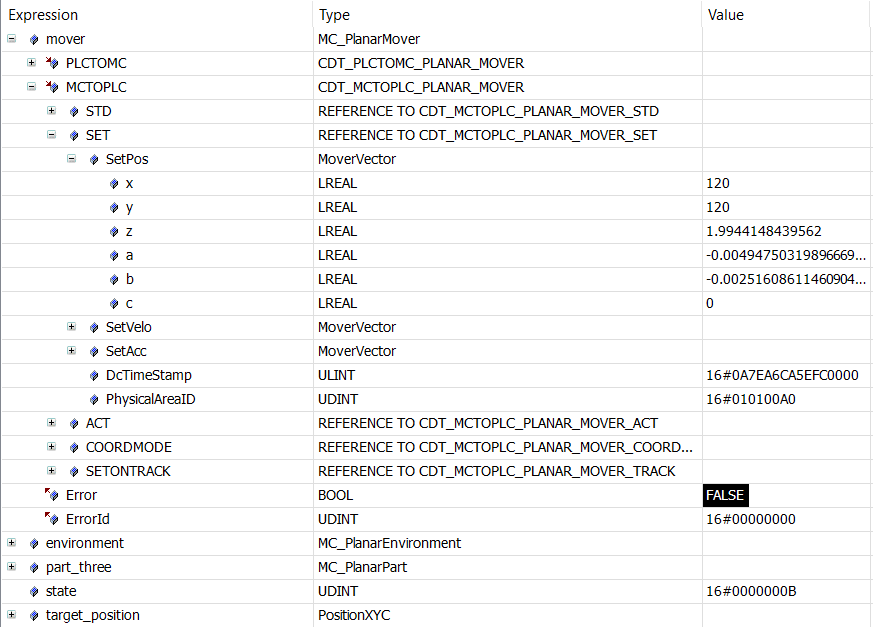
Der Mover steht am Ende des Zustandsautomaten (state=11, im Bild unten hexadezimal dargestellt als B) auf der gewünschten Position. Die Position ist im Koordinatensystem zwei (Objekt Id 16#010100A0) angegeben. Der Mover hat zusammen mit Part 3 das Koordinatensystem gewechselt, bzw. ist mit dem Aufzug auf eine andere Ebene gefahren. Insgesamt kann können Sie im Beispiel gut sehen, dass die Planar-Part PLC Objekte nur leichte Environment Wrapper sind, die mit der Environment initialisiert werden müssen und ihre Befehle über die Environment verschicken.